16.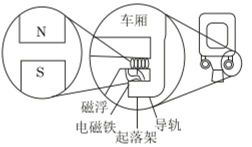 如图是“追风者”磁悬浮列车悬浮原理的示意图.该列车通过磁体之间的相互作用,悬浮在轨道上方,以提高运行速度,这里的相互作用是指( )
如图是“追风者”磁悬浮列车悬浮原理的示意图.该列车通过磁体之间的相互作用,悬浮在轨道上方,以提高运行速度,这里的相互作用是指( )
如图是“追风者”磁悬浮列车悬浮原理的示意图.该列车通过磁体之间的相互作用,悬浮在轨道上方,以提高运行速度,这里的相互作用是指( )| A. | 异名磁极相互吸引 | B. | 同名磁极相互吸引 | ||
| C. | 异名磁极相互排斥 | D. | 同名磁极相互排斥 |
15.自行车的结构及使用涉及到不少科学知识,自行车的轮胎表面有凹凸不平的花纹是为了( )
| A. | 增大压力 | B. | 增大摩擦力 | C. | 减小压力 | D. | 减小摩擦 |
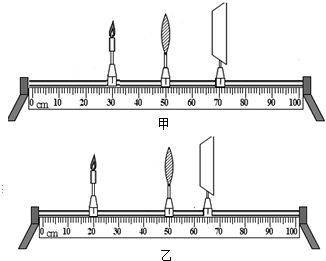 小华同学用蜡烛、凸透镜和光屏等器材做“探究凸透镜成像规律”的实验.
小华同学用蜡烛、凸透镜和光屏等器材做“探究凸透镜成像规律”的实验.
13.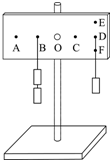 在探究杠杆平衡条件的时候,小明在均匀木板中间挖孔,孔中插一金属杆,固定在铁架台上,木板可以围绕中间自由转动.每个钩码的质量为200g,A、B、C、D、E、F为挂钩,已知AB=BO=OC=CD,ABOCD的连线与EDF的连线垂直.现在B处挂两个钩码,D处挂一个钩码,木板在水平位置平衡(如图所示).下列做法能使木板重新平衡的是( )
在探究杠杆平衡条件的时候,小明在均匀木板中间挖孔,孔中插一金属杆,固定在铁架台上,木板可以围绕中间自由转动.每个钩码的质量为200g,A、B、C、D、E、F为挂钩,已知AB=BO=OC=CD,ABOCD的连线与EDF的连线垂直.现在B处挂两个钩码,D处挂一个钩码,木板在水平位置平衡(如图所示).下列做法能使木板重新平衡的是( )
在探究杠杆平衡条件的时候,小明在均匀木板中间挖孔,孔中插一金属杆,固定在铁架台上,木板可以围绕中间自由转动.每个钩码的质量为200g,A、B、C、D、E、F为挂钩,已知AB=BO=OC=CD,ABOCD的连线与EDF的连线垂直.现在B处挂两个钩码,D处挂一个钩码,木板在水平位置平衡(如图所示).下列做法能使木板重新平衡的是( )| A. | 在B、D两处各加挂一个钩码 | |
| B. | 在B处加挂2个钩码、D处加挂一个钩码 | |
| C. | B处挂两个钩码不变,把D处的一个钩码挂在E处 | |
| D. | B处挂两个钩码不变,把D处的一个钩码挂在F处 |
12.小明对教室中一些物理量的估测,合理的是( )
| A. | 黑板擦受到的重力约为100N | |
| B. | 课桌的高度约为80cm | |
| C. | 教室内一盏日光灯的功率约为1000W | |
| D. | 教室内感觉比较舒适的温度约为37℃ |
11. 在探究“影响滑动摩擦力大小因素”的实验中,小强有如下猜想:
在探究“影响滑动摩擦力大小因素”的实验中,小强有如下猜想:
A.滑动摩擦力大小与压力大小有关
B.滑动摩擦力大小与接触面的粗糙程度有关
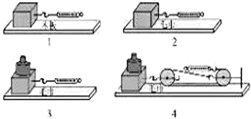
为此小强进行了如图所示实验,实验数据如表
(1)实验1、2、3中,用弹簧测力计水平拉动木块,使其做匀速直线运动,根据二力平衡知识可知滑动摩擦力大小等于拉力大小.
(2)由实验1、2可验证猜想B(选填“A”或“B”)正确,并可得到的结论是:压力一定时,接触面越粗糙,摩擦力越大.
(3)接着小强在毛巾表面上,进行第4次实验,如图4所示,使木块水平匀速直线移动了15cm,则绳子自由端水平移动的距离为30cm,若此滑轮组的机械效率η=80%,则表中序号4弹簧测力计的示数是3.5N(不计滑轮组重力).
在探究“影响滑动摩擦力大小因素”的实验中,小强有如下猜想:A.滑动摩擦力大小与压力大小有关
B.滑动摩擦力大小与接触面的粗糙程度有关
为此小强进行了如图所示实验,实验数据如表
| 序号 | 压力/N | 接触面种类 | 弹簧测力计示数/N |
| 1 | 6 | 木板 | 1.5 |
| 2 | 6 | 毛巾 | 2.8 |
| 3 | 12 | 毛巾 | 5.6 |
| 4 | 12 | 毛巾 | ? |
(2)由实验1、2可验证猜想B(选填“A”或“B”)正确,并可得到的结论是:压力一定时,接触面越粗糙,摩擦力越大.
(3)接着小强在毛巾表面上,进行第4次实验,如图4所示,使木块水平匀速直线移动了15cm,则绳子自由端水平移动的距离为30cm,若此滑轮组的机械效率η=80%,则表中序号4弹簧测力计的示数是3.5N(不计滑轮组重力).
10. 中国已成为机器人与智能装备产业全球最大应用市场,在第二届中国(重庆)国际机器人及智能制造装备论坛暨博览会上,如图所示是送餐机器人工作时在水平地面上匀速前行.下列说法正确的是( )
中国已成为机器人与智能装备产业全球最大应用市场,在第二届中国(重庆)国际机器人及智能制造装备论坛暨博览会上,如图所示是送餐机器人工作时在水平地面上匀速前行.下列说法正确的是( )
0 166615 166623 166629 166633 166639 166641 166645 166651 166653 166659 166665 166669 166671 166675 166681 166683 166689 166693 166695 166699 166701 166705 166707 166709 166710 166711 166713 166714 166715 166717 166719 166723 166725 166729 166731 166735 166741 166743 166749 166753 166755 166759 166765 166771 166773 166779 166783 166785 166791 166795 166801 166809 235360
中国已成为机器人与智能装备产业全球最大应用市场,在第二届中国(重庆)国际机器人及智能制造装备论坛暨博览会上,如图所示是送餐机器人工作时在水平地面上匀速前行.下列说法正确的是( )| A. | 餐盘相对于机器人是运动的 | |
| B. | 餐盘中食品受到平衡力作用 | |
| C. | 机器人在水平地面匀速前行过程中机械能增大 | |
| D. | 机器人在水平地面匀速前行时不受摩擦力的作用 |
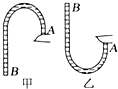 把一根两端开口的细管浸入水中,充满水后用手指把一端堵住,移出水面,如图甲所示
把一根两端开口的细管浸入水中,充满水后用手指把一端堵住,移出水面,如图甲所示