17.阅读短文,回答问题:
智能扫地机器人
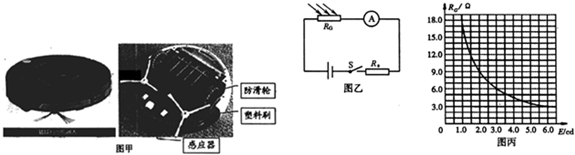
智能扫地机器人是一款能自动清扫的家用电器,如图甲所示.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮上印有凸凹不平的花纹;底部安装有塑料刷,用于清扫吸附在地板或地毯上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.
表一:
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差;风量指单位时间内通过吸尘电机排出的空气体积;吸尘电机吸入功率与输入功率的比值叫做效率.
表二:
(1)下列说法中错误的是B.
A.机器人通过电动机旋转产生高速气流,以此来减小主机内部的气压而产生吸力.
B.在地毯纤维内掺杂金属丝,会增加机器人对灰尘及轻小物体的清扫难度
C.防滑轮上印有凸凹不平的花纹,是为了增大机器人与地面间的摩擦
D.当遇到黑色真皮沙发等深色障碍物时,使用超声波感应器效果较好
(2)若该机器人向障碍物垂直发射超声波,经过0.02s收到回波,则其发射超声波时与障碍物间的距离约为3.4m(此空答案保留一位小数);在这段时间内机器人向前行进的距离为0.006m.
(3)电池容量“2000mAh”是指当工作电流为2000mA,能持续供电1h.该机器人充满电后至下一次自动充电前能够连续正常工作的最长时间为0.64h.假设返回充电过程中受到的阻力为36N,剩余电池容量支持正常工作所能做的电功的20%用于克服阻力做功,为确保机器人能顺利返回充电,需要充电时离充电座最远为96 m.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,5min内通过吸尘电机提出的空气质量为5.85kg.(ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件,图乙为光敏电阻的控制电路,电源电压U恒定,空气中的灰尘浓度会影响空气透光程度,RG为光敏电阻,其阻值随光照射的强弱而改变.“光强”表示光的强弱程度的物理量,照射光越强,光强越大,光强符号用E表示,国际单位为坎德拉(cd).实验测得光敏电阻的阻值RG与光强E间的关系如图丙所示,R0为定值电阻.当光照强度为4.5cd时,电流表的读数为0.5A;当光照强度为1.5cd时,电流表的读数为0.3A,则R0=8Ω.为监测空气的透光程度,现将电流表表盘的电流I刻度值转化为对应的总阻值(R0+RG ),则转化后表盘上从左到右相邻两刻度线对应总阻值的差值将逐渐减小,原因是电流表的示数I与总阻值(R0+RG)成反比.
智能扫地机器人
智能扫地机器人是一款能自动清扫的家用电器,如图甲所示.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮上印有凸凹不平的花纹;底部安装有塑料刷,用于清扫吸附在地板或地毯上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.
表一:
| 额定工作电压 | 12V | 额定工作电流 | 2.5A |
| 电池容量 | 2000mAh | 行进速度 | 0.3m/s |
表二:
| 真空度/Pa | 400 | 450 | 500 | 550 | 600 |
| 风量/(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
| 吸入功率/W | 10.00 | 9.00 | 8.50 | 8.25 | 7.80 |
A.机器人通过电动机旋转产生高速气流,以此来减小主机内部的气压而产生吸力.
B.在地毯纤维内掺杂金属丝,会增加机器人对灰尘及轻小物体的清扫难度
C.防滑轮上印有凸凹不平的花纹,是为了增大机器人与地面间的摩擦
D.当遇到黑色真皮沙发等深色障碍物时,使用超声波感应器效果较好
(2)若该机器人向障碍物垂直发射超声波,经过0.02s收到回波,则其发射超声波时与障碍物间的距离约为3.4m(此空答案保留一位小数);在这段时间内机器人向前行进的距离为0.006m.
(3)电池容量“2000mAh”是指当工作电流为2000mA,能持续供电1h.该机器人充满电后至下一次自动充电前能够连续正常工作的最长时间为0.64h.假设返回充电过程中受到的阻力为36N,剩余电池容量支持正常工作所能做的电功的20%用于克服阻力做功,为确保机器人能顺利返回充电,需要充电时离充电座最远为96 m.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,5min内通过吸尘电机提出的空气质量为5.85kg.(ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件,图乙为光敏电阻的控制电路,电源电压U恒定,空气中的灰尘浓度会影响空气透光程度,RG为光敏电阻,其阻值随光照射的强弱而改变.“光强”表示光的强弱程度的物理量,照射光越强,光强越大,光强符号用E表示,国际单位为坎德拉(cd).实验测得光敏电阻的阻值RG与光强E间的关系如图丙所示,R0为定值电阻.当光照强度为4.5cd时,电流表的读数为0.5A;当光照强度为1.5cd时,电流表的读数为0.3A,则R0=8Ω.为监测空气的透光程度,现将电流表表盘的电流I刻度值转化为对应的总阻值(R0+RG ),则转化后表盘上从左到右相邻两刻度线对应总阻值的差值将逐渐减小,原因是电流表的示数I与总阻值(R0+RG)成反比.
16.如图所示的实验中,没有应用到连通器原理的是( )
| A. |  茶壶 | B. |  船闸 | ||
| C. |  盆景自动供水装置 | D. |  乳牛自动喂食器 |
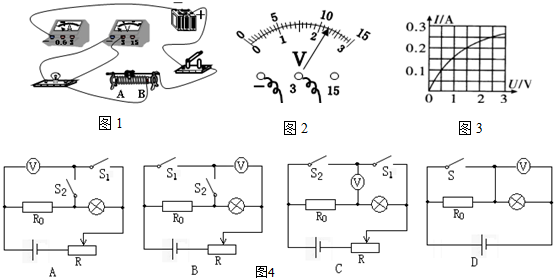
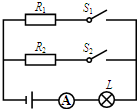 如图所示,电源电压保持不变,R1:R2=1:4.只闭合S1时,规格为“4V 2W”灯泡恰好正常发光,此时R1的功率为P1;只闭合S2时,电流表的示数为0.25A,此时R2的功率为P2,(设灯泡的电阻不随温度的变化而变化).求:
如图所示,电源电压保持不变,R1:R2=1:4.只闭合S1时,规格为“4V 2W”灯泡恰好正常发光,此时R1的功率为P1;只闭合S2时,电流表的示数为0.25A,此时R2的功率为P2,(设灯泡的电阻不随温度的变化而变化).求: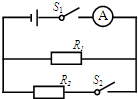 如图所示的电路中,R1的阻值为10Ω,只闭合开关S1时电流表的示数为0.3A,再闭合开关S2后,电流表的示数为0.45A,求:
如图所示的电路中,R1的阻值为10Ω,只闭合开关S1时电流表的示数为0.3A,再闭合开关S2后,电流表的示数为0.45A,求:
9.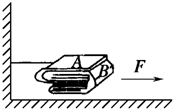 如图所示,有两本完全相同的书A、B,书重均为5牛,若将两本书等分成若干份后,交叉地叠放在一起置于光滑桌面上,并将书A固定不动,用水平向右的力F把书B匀速抽出,现测得一组数据如表:
如图所示,有两本完全相同的书A、B,书重均为5牛,若将两本书等分成若干份后,交叉地叠放在一起置于光滑桌面上,并将书A固定不动,用水平向右的力F把书B匀速抽出,现测得一组数据如表:
根据以上数据,试求:
(1)若将书分成32份,力F应为94.5N;
(2)该书任意两张纸之间的动摩擦因数为0.3.
0 166325 166333 166339 166343 166349 166351 166355 166361 166363 166369 166375 166379 166381 166385 166391 166393 166399 166403 166405 166409 166411 166415 166417 166419 166420 166421 166423 166424 166425 166427 166429 166433 166435 166439 166441 166445 166451 166453 166459 166463 166465 166469 166475 166481 166483 166489 166493 166495 166501 166505 166511 166519 235360
如图所示,有两本完全相同的书A、B,书重均为5牛,若将两本书等分成若干份后,交叉地叠放在一起置于光滑桌面上,并将书A固定不动,用水平向右的力F把书B匀速抽出,现测得一组数据如表:| 实验次数 | 1 | 2 | 3 | 4 | … | n |
| 将书分成的份数 | 2 | 4 | 8 | 16 | … | 逐页交叉 |
| 力F的大小(N) | 4.5 | 10.5 | 22.5 | 46.5 | … | 190.5 |
(1)若将书分成32份,力F应为94.5N;
(2)该书任意两张纸之间的动摩擦因数为0.3.