12.如图是电磁波及其应用实例,下列说法正确的是( )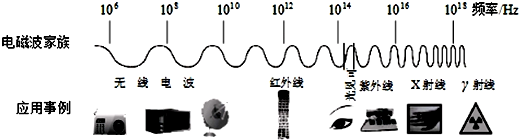
| A. | 紫外线是紫色的 | |
| B. | 体检胸透用的X射线频率比无线电波低 | |
| C. | 电视机遥控器用γ射线遥控 | |
| D. | 可见光与无线电波在真空中的传播速度相同 |
11. 某电视台推出“扫二维码,抢红包”活动.用手机摄像头扫描屏幕上的二维码(如图)可成像在内部的识别模块上实现登录,获得红包.扫描二维码时,下列说法正确的是( )
某电视台推出“扫二维码,抢红包”活动.用手机摄像头扫描屏幕上的二维码(如图)可成像在内部的识别模块上实现登录,获得红包.扫描二维码时,下列说法正确的是( )
某电视台推出“扫二维码,抢红包”活动.用手机摄像头扫描屏幕上的二维码(如图)可成像在内部的识别模块上实现登录,获得红包.扫描二维码时,下列说法正确的是( )| A. | 摄像头相当于凹透镜 | B. | 摄像头越靠近二维码越好 | ||
| C. | 二维码成虚像 | D. | 二维码一定成倒立的像 |
10. 春天的清晨,小宇抓拍到一颗小水珠从约半米高的草叶上掉到水面的精妙瞬间(如图).他估算了一系列数值,最接近事实的是( )
春天的清晨,小宇抓拍到一颗小水珠从约半米高的草叶上掉到水面的精妙瞬间(如图).他估算了一系列数值,最接近事实的是( )
春天的清晨,小宇抓拍到一颗小水珠从约半米高的草叶上掉到水面的精妙瞬间(如图).他估算了一系列数值,最接近事实的是( )| A. | 小水珠质量约为0.05g | B. | 小水珠的直径约为3cm | ||
| C. | 小水珠的温度约为30℃ | D. | 小水珠下落时间约为1min |
 目前我市已有部分校车投入使用,如图为某学校校车,其总质量为6.4t,车轮跟地面接触的总面积为1600cm2,这辆校车在某段平直公路上匀速行驶8km用时10min,消耗柴油2L,受到的阻力是1.8×103N,(柴油热值3.3×107J/kg,柴油的密度0.85×103kg/m3,)求:
目前我市已有部分校车投入使用,如图为某学校校车,其总质量为6.4t,车轮跟地面接触的总面积为1600cm2,这辆校车在某段平直公路上匀速行驶8km用时10min,消耗柴油2L,受到的阻力是1.8×103N,(柴油热值3.3×107J/kg,柴油的密度0.85×103kg/m3,)求:
8. “3•15”消费者权益日,小明在电视节目上了解到市场上有一批劣质天然气热水器混入(主要是热效率差,造成资源浪费),其款式与他家新安装的一样.小明想估测自己家热水器的热效率,他找到了包装箱和热水器铭牌,获得了如表信息:
“3•15”消费者权益日,小明在电视节目上了解到市场上有一批劣质天然气热水器混入(主要是热效率差,造成资源浪费),其款式与他家新安装的一样.小明想估测自己家热水器的热效率,他找到了包装箱和热水器铭牌,获得了如表信息:
小明接通热水器工作开关,当流出40kg热水时,让热水器停止工作.已知当时自来水的温度是15℃,热水器输出的热水温度为40℃,观察天然气表得知共用了0.15m3的天然气,天然气的热值为3.2×107J/m3,水的比热容4.2×103J/(kg•℃),g取10N/kg.求:
(1)若在仓储时堆码层达到了极限,则最下层的包装箱上表面承受的压强是多大?
(2)小明的估测过程中,流过热水器的水吸收的热量是多少?天然气完全燃烧释放的热量是多少?
(3)通过计算说明小明家的热水器是否是正品?
“3•15”消费者权益日,小明在电视节目上了解到市场上有一批劣质天然气热水器混入(主要是热效率差,造成资源浪费),其款式与他家新安装的一样.小明想估测自己家热水器的热效率,他找到了包装箱和热水器铭牌,获得了如表信息:| 包装箱及热水器的总质量为16kg |
| “堆码层数极限”标志数为11,即该包装箱在仓储时从地面开始,平放时最大堆放层数是11层,超过则可能把最底层的包装箱压坏 |
| 包装箱平放时的底面积为0.4m2 |
| 热效率为85%~90%.表示该热水器工作时,天然气完全燃烧所消耗的化学能,有85%~90%的转化为水的内能 |
| 加热模式为“即热式”.即用热水器给水加热时,只要接通开关让自来水流过热水器,流出的水即可达到设定的水温 |
(1)若在仓储时堆码层达到了极限,则最下层的包装箱上表面承受的压强是多大?
(2)小明的估测过程中,流过热水器的水吸收的热量是多少?天然气完全燃烧释放的热量是多少?
(3)通过计算说明小明家的热水器是否是正品?
7.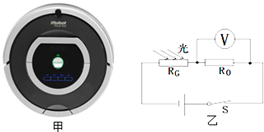 扫地机器人是一款能自动清扫的智能家用电器,如图甲.
扫地机器人是一款能自动清扫的智能家用电器,如图甲.
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.
表一:
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差.风量指单位时间内通过吸尘电机排出的空气体积.吸尘电机吸入功率与输入功率的比值叫做效率.
表二:
(1)机器人工作时,主机内部的气压小于(选填“大于”、“小于”或“等于”)大气压而产生吸力.若该机器人向障碍物垂直发射超声波,经过0.001s收到回波,则其发射超声波时与障碍物间的距离约为17cm.(设超声波在空气中的传播速度为340m/s)
(2)下列说法中错误的是B.
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)该机器人正常工作时的电流为2.5A;充满电后至下一次自动充电前能够连续正常工作的最长时间为48min.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,10min内通过吸尘电机提出的空气质量为11.7kg.(取ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω;为监测空气的透光程度,要将电压表表盘的相关刻度值转化为对应的总阻值(R0+RG),则转化后表盘上从左到右刻度线对应的阻值将减小(选填“增大”、“不变”或“减小”).
0 166306 166314 166320 166324 166330 166332 166336 166342 166344 166350 166356 166360 166362 166366 166372 166374 166380 166384 166386 166390 166392 166396 166398 166400 166401 166402 166404 166405 166406 166408 166410 166414 166416 166420 166422 166426 166432 166434 166440 166444 166446 166450 166456 166462 166464 166470 166474 166476 166482 166486 166492 166500 235360
扫地机器人是一款能自动清扫的智能家用电器,如图甲.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.
表一:
| 额定工作电压 | 12V | 额定功率 | 30W |
| 电池容量 | 2500mAh | 工作噪音 | <50dB |
表二:
| 真空度(Pa) | 400 | 450 | 500 | 550 | 600 |
| 风量(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
| 吸入功率(W) | 10.00 | 9.00 | 8.50 | 7.80 |
(2)下列说法中错误的是B.
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)该机器人正常工作时的电流为2.5A;充满电后至下一次自动充电前能够连续正常工作的最长时间为48min.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,10min内通过吸尘电机提出的空气质量为11.7kg.(取ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω;为监测空气的透光程度,要将电压表表盘的相关刻度值转化为对应的总阻值(R0+RG),则转化后表盘上从左到右刻度线对应的阻值将减小(选填“增大”、“不变”或“减小”).
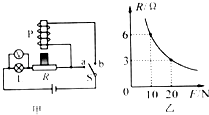 如图甲所示,电源电压U=16V,S为单刀双掷开关,小灯泡L的电阻RL=10Ω,且保持不变,R为某种压敏电阻,其阻值R与压力F成反比关系,(如图乙所示),R的正上方装有一电磁铁P,其线圈电阻不计,g取10N/kg.
如图甲所示,电源电压U=16V,S为单刀双掷开关,小灯泡L的电阻RL=10Ω,且保持不变,R为某种压敏电阻,其阻值R与压力F成反比关系,(如图乙所示),R的正上方装有一电磁铁P,其线圈电阻不计,g取10N/kg.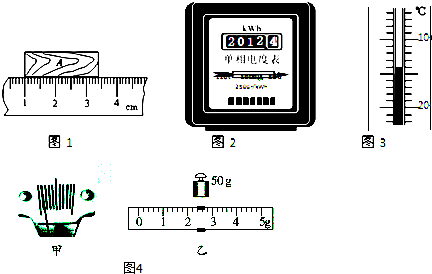
 计算机鼠标内装有起自动控制作用的传感器,如图是它的工作原理示意图.当物体M在导轨上平行移动时,可带动与之相连的金属滑片P移动,通过电压表示数可反映物体M移动的距离.当物体M向右移动时,传感器接到电路中的阻值不变,电流表示数将不变,电压表示数将变大.(选填“变大”、“不变”或“变小”)
计算机鼠标内装有起自动控制作用的传感器,如图是它的工作原理示意图.当物体M在导轨上平行移动时,可带动与之相连的金属滑片P移动,通过电压表示数可反映物体M移动的距离.当物体M向右移动时,传感器接到电路中的阻值不变,电流表示数将不变,电压表示数将变大.(选填“变大”、“不变”或“变小”)