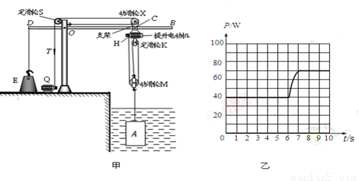
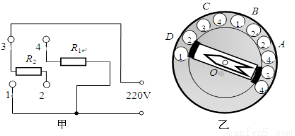
在学校创新比赛中,小亮同学设计了一个多档位的家用电热水器。图甲是他设计的电热水器的工作电路图,图中R1和R2是两根电热丝。他设计的换档开关如图乙所示,换档开关内有一块绝缘圆盘,在圆盘的边缘共有10个金属触点(在图乙中用“○”表示,“○”中标有1、2、3、4编号,编号相同的触点已用导线连接);旋钮可以绕中心轴O转动,两端各有一个金属滑片,转动旋钮可以将相邻的两个触点连通。例如,图乙中,旋钮上的箭头指向图中位置D,此时,箭头一端的金属滑片将1、2两触点连通,同时另一端的金属滑片也将3、4两触点连通。当旋钮上的箭头指向A、B、C、D不同位置时,可以实现四档加热功率。他设计的四档加热功率如下表所示:
加热档位 | 1 | 2 | 3 | 4 |
加热功率/W | 1100 |
| 440 |
|
(计算结果若除不尽,均保留一位小数)
(1)如果要实现旋钮沿某个方向转动时,加热功率依次递减或递增,请写出旋钮上的箭头分别指向A、B、C、D四个位置时,各对应加热功率的哪一个档位?并画出对应的等效电路图。
(2)电热丝R1和R2的阻值各是多少?
(3)当旋钮在加热档位2和4时,对应的加热功率各是多大?