题目内容
4.在用电压表和电流表测电阻的实验中,用两节干电池作电源,一个阻值范围在0~10Ω的滑动变阻器,一只量程为0~0.6A和0~3A的电流表,一只量程为0~3V和0~15V的电压表,待测电阻阻值估计为5~12Ω之间.(1)实验原理是R=$\frac{U}{I}$.
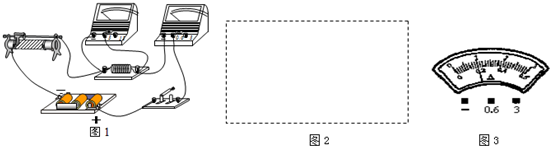
(2)用笔画线代替导线将图1中的实验元件连成电路(要求将变阻器的A端接入电路).
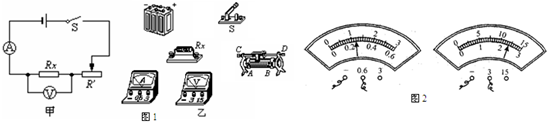
(3)连接电路时,开关应处于断开状态,闭合开关前,应使滑动变阻器的滑片在B(A或B)端.
(4)利用滑动变阻器,可改变电压和电流,从而实现多次测量.此实验中多次测量的目的是减小误差.
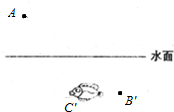
(5)若电压表、电流表的示数如图2所示,电阻Rx=10Ω.
分析 (1)测电阻的实验原理:R=$\frac{U}{I}$;
(2)根据电路图连接电路,根据电源电压确定电压表的量程,根据I=$\frac{U}{R}$计算出电路中的最大电流,确定电流表的量程;
(3)为保护电路,连接电路时应断开开关,闭合开关前,应将滑片移至最大阻值处;
(4)测量定值电阻的阻值,为减小误差,应进行多次测量求平均值;
(5)确定电压表和电流表的量程及分度值,读出示数,根据R=$\frac{U}{I}$计算电阻的阻值.
解答 解:(1)伏安法测电阻的实验原理:R=$\frac{U}{I}$;
(2)根据电路图连接实物电路,电源电压为U=2×1.5V=3V,所以电压表可用0~3V的量程;电路中的最大电流为:I=$\frac{U}{R}$=$\frac{3V}{5Ω}$=0.6A,所以电流表采用0~0.6A的量程,电路连接如图所示:
(3)连接电路时,开关应处于断开状态,由图甲知,滑动变阻器的下面接了左边的接线柱,闭合开关前,应使滑动变阻器的滑片在最右端即B端,使其阻值最大;
(4)定值电阻的阻值不变,实验中改变变阻器的阻值,改变电阻两端的电压及通过电阻的电流,测出多组数据,通过多次测量求平均值的方法来减小测量误差;
(5)由图2知,电流表的量程为0~0.6A,分度值为0.02A,示数为0.24A;电压表的量程为0~3V,分度值为0.1V,示数为2.4V;
则电阻的阻值Rx=$\frac{U}{I}$=$\frac{2.4V}{0.24A}$=10Ω.
故答案为:(1)R=$\frac{U}{I}$;(2)见上图;(3)断开;B;(4)减小误差;(5)10.
点评 本题是伏安法测电阻的相关实验,根据其实验原理,要用到电压表和电流表分别测出电阻两端的电压及通过电阻的电流,根据R=$\frac{U}{I}$计算出其阻值,所以要掌握电流表、电压表的使用方法,同时要掌握滑动变阻器的作用及使用规则,掌握多次测量的目的.

| A. | 10J | B. | 100J | C. | 4J | D. | 40J |
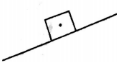
 小明在平静的湖边看到了“云在水中飘、鱼在云上游”的有趣现象,如图,他看见在水中C′处有一条鱼,这是光的折射形成的虚像,鱼旁边有一只鸟B′,若小明的眼睛在A处,请做出他看见的光路图,并确定鸟的实际位置.
小明在平静的湖边看到了“云在水中飘、鱼在云上游”的有趣现象,如图,他看见在水中C′处有一条鱼,这是光的折射形成的虚像,鱼旁边有一只鸟B′,若小明的眼睛在A处,请做出他看见的光路图,并确定鸟的实际位置. 随着生活水平的提高,扫地机器人逐步进入普通家庭,扫地机器人通过电动机 旋转产生髙速气流,将灰尘、杂物吸入集尘盒:其防滑轮皮采用凸凹材质制成:底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体:前端装有感应器,通过发射、接收超声来侦测障碍物.
随着生活水平的提高,扫地机器人逐步进入普通家庭,扫地机器人通过电动机 旋转产生髙速气流,将灰尘、杂物吸入集尘盒:其防滑轮皮采用凸凹材质制成:底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体:前端装有感应器,通过发射、接收超声来侦测障碍物.| 额定工作电压 | 20V | 额定功率 | 30W |
| 电池容量 | 3000mA h | 工作噪音 | <50dB |
(2)若充满电后所有电量用于扫地,则可供机器人持续工作多长时间?
(3)机器人的供电系统没有自动充电功能,当检测到电池容量低至10%时会自动返回充电.若返回过程中受到的阻力为30N,为确保机器人能顺利返回充电,需要充电时离充电座最远不能超过多少米?(剩余电池容量的40%用于提供克服阻力做功)
 如图,一个木箱静止放在斜面上,画出它受到的重力和摩擦力的示意图.
如图,一个木箱静止放在斜面上,画出它受到的重力和摩擦力的示意图.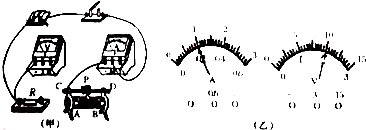
(1)按如图1所示实物连接情况,在图2方框里画出电路图.
(2)连接电路是应注意:开关应处于断开位置;滑动变阻器应置于最右端(最左,最右).
(3)检查电路开始实验.前两次的实验数据已填在下面的表格内,第三次实验时电流表的示数如图3所示,请将下面表格中的空白处填写完整.(计算结果保留一位小数)
| 实验次数 | 电流/A | 电压/V | 电阻/Ω | 测量结果 R=8.1Ω |
| 1 | 0.30 | 2.5 | 8.3 | |
| 2 | 0.26 | 2.1 | 8.1 | |
| 3 | 1.6 |

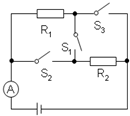 如图所示电路中,电阻R1的阻值为20Ω,电源电压不变.当S3闭 合S1、S2断开时,电流表示数为0.6A;S1断开,S2、S3闭合时,电流表示数为0.9A.求:
如图所示电路中,电阻R1的阻值为20Ω,电源电压不变.当S3闭 合S1、S2断开时,电流表示数为0.6A;S1断开,S2、S3闭合时,电流表示数为0.9A.求: