题目内容
18. 武汉人民生活质量在提高,住房的玻璃窗也变得越来越大.大玻璃窗户的清洁可由如图所示的“自动擦窗机器人”完成.某“自动擦窗机器人”的质量为2kg,它的“腹部”有吸盘.当自动擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.
武汉人民生活质量在提高,住房的玻璃窗也变得越来越大.大玻璃窗户的清洁可由如图所示的“自动擦窗机器人”完成.某“自动擦窗机器人”的质量为2kg,它的“腹部”有吸盘.当自动擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.(1)当自动擦窗机器人在竖直玻璃板上静止时,摩擦力为20N.此时若真空泵继续向外抽气,则自动擦窗机器人受到的摩擦力不变(选填“变大”、“变小”或“不变”).
(2)吸盘与玻璃的接触面积为1.2×10-3m2,若吸盘在此面积上对玻璃的压强为1.5×105Pa,则吸盘对玻璃的压力是180N.
(3)自动擦窗机器人竖直向下运动时,若真空泵继续向外抽气,则自动擦窗机器人受到的摩擦力变大(选填“变大”、“变小”或“不变”).
分析 (1)首先要明确静止和匀速下滑时,物体都处于平衡状态,受平衡力,只要找出哪两个力是平衡力,然后根据平衡力的特点解题就可;
(2)根据压强定义式的变形公式F=pS可求压力;
(3)根据影响滑动摩擦力大小的因素分析摩擦力的变化.
解答 解:
(1)“擦窗机器人”的重力G=mg=2kg×10N/kg=20N,“擦窗机器人”静止时处于平衡状态,即受力平衡,在竖直方向上摩擦力和重力平衡,则摩擦力大小等于重力大小20N,只要“擦窗机器人”在竖直玻璃上静止,重力不变,摩擦力就不变;
(2)由p=$\frac{F}{S}$得,吸盘对玻璃的压力F=pS=1.5×105Pa×1.2×10-3m2=180N;
(3)自动擦窗机器人竖直向下运动时,若真空泵继续向外抽气,自动擦窗机器人对玻璃的压力增大,自动擦窗机器人受到的摩擦力会摩擦力变大.
故答案为:(1)20;不变;(2)180N;(3)变大.
点评 本题考查了二力平衡的特点及对压强公式、重力公式、影响摩擦力大小因素的掌握.物体在平衡状态下受平衡力,找出平衡力是解题关键.

练习册系列答案
 应用题作业本系列答案
应用题作业本系列答案
相关题目
9.下列装置中与发电机的原理工作相同的是( )
| A. | 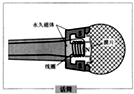 | B. |  | C. |  | D. | 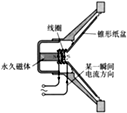 |
6.下列数据中,比较符合实际情况的是( )
| A. | 教室天花板到地面的距离约为3m | B. | 一支圆珠笔的长度约为50cm | ||
| C. | 一个鸡蛋所受的重力约为2N | D. | 一个苹果的质量约为1.5kg |
13.磁性水雷是用一个可以绕轴转动的小磁针来控制起爆电路的,军舰被地磁场磁化后就变成了一个浮动的磁体,当军舰接近水雷时,就会引起水雷的爆炸.下列各组实验中,实验原理和水雷相同的是( )
| A. |  | B. |  | ||
| C. |  | D. |  |
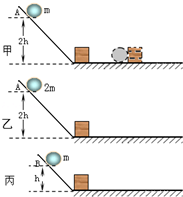 动能的大小与哪些因素有关呢?小雨相同的斜面、长木板和纸盒,两个不同质量的小球,设计了如图所示的甲、乙、丙三次实验,测量出每次实验中纸盒移动的距离,再通过比较分析得出结论.
动能的大小与哪些因素有关呢?小雨相同的斜面、长木板和纸盒,两个不同质量的小球,设计了如图所示的甲、乙、丙三次实验,测量出每次实验中纸盒移动的距离,再通过比较分析得出结论.
6.根据“探究杠杆平衡的条件”实验要求,完成下列各题: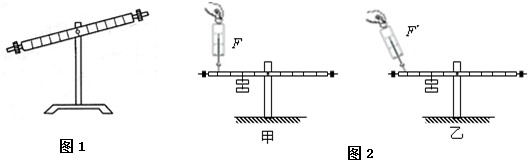
(1)杠杆平衡,是指杠杆处于静止状态或匀速状态.
(2)该实验中所用的器材有铁架台、带刻度的杠杆、钩码、弹簧夹和弹簧测力计.某同学先把杠杆的中点支在支架上,发现杠杆的右端翘起如图1所示,他可以通过调节左端的平衡螺母向右移动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
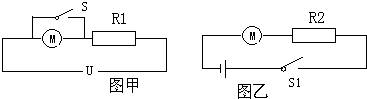
(3)如果采用图2的方法实验,当弹簧测力计由图甲竖直的拉着变成图乙倾斜的拉着,使杠杆在水平位置静止时,弹簧测力计的示数将变大(选填“变大”、“不变”或“变小”).
(4)小明同学做了二次试验,得到当杠杆平衡时如表中记录的数据:
这两组数据中,可以肯定序号2的一组数据是错误的,如果他的操作正确,钩码的重量和力臂的值也没有错,那么此组数据的错误的原因是动力或动力臂测量错误.
(5)改变力和力臂的数值,实验三次的目的是C
A、从三次试验中选取最准确的数据;
B、三次测量取平均值,减小实验误差;
C、从实验数据中得到普遍规律;
D、利用控制变量法.
(6)本实验的实验结论是F1L1=F2L2.
(1)杠杆平衡,是指杠杆处于静止状态或匀速状态.
(2)该实验中所用的器材有铁架台、带刻度的杠杆、钩码、弹簧夹和弹簧测力计.某同学先把杠杆的中点支在支架上,发现杠杆的右端翘起如图1所示,他可以通过调节左端的平衡螺母向右移动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(3)如果采用图2的方法实验,当弹簧测力计由图甲竖直的拉着变成图乙倾斜的拉着,使杠杆在水平位置静止时,弹簧测力计的示数将变大(选填“变大”、“不变”或“变小”).
(4)小明同学做了二次试验,得到当杠杆平衡时如表中记录的数据:
| 实验序号 | 动力F1(N) | 动力臂L1(cm) | 阻力F2(N) | 阻力臂L2(cm) |
| 1 | 2 | 12 | 6 | 4 |
| 2 | 4 | 16 | 2 | 8 |
(5)改变力和力臂的数值,实验三次的目的是C
A、从三次试验中选取最准确的数据;
B、三次测量取平均值,减小实验误差;
C、从实验数据中得到普遍规律;
D、利用控制变量法.
(6)本实验的实验结论是F1L1=F2L2.