题目内容
 在探究杠杆的平衡条件时,实验前首先应调节杠杆两端的螺母,直到杠杆在
在探究杠杆的平衡条件时,实验前首先应调节杠杆两端的螺母,直到杠杆在分析:当杠杆在不挂钩码时处于水平平衡状态时,杠杆的重心在支点上,杠杆的重力力臂为0,避免了杠杆重力对杠杆平衡的影响.
若弹簧测力计的示数变为原来的
,力臂没变化,动力和动力臂的乘积变为原来的
,要保持杠杆仍然平衡,阻力和阻力臂的乘积也要变为原来的
.
若弹簧测力计的示数变为原来的
| 1 |
| 2 |
| 1 |
| 2 |
| 1 |
| 2 |
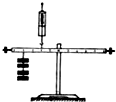
解答:解:(1)在探究杠杆的平衡条件时,实验前首先应调节杠杆两端的螺母,直到杠杆在水平位置平衡.当杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,因此杠杆在水平位置平衡时,杠杆重力的力臂为零;
(2)如图,杠杆原来平衡,F1×L1=F2×L2,
若弹簧测力计的示数变为原来的
,使动力臂和阻力臂不变,动力变为原来的
,要使杠杆还平衡,G也要变为原来的
,即减小两个钩码.
故答案为:水平;0;减小两个钩码.
(2)如图,杠杆原来平衡,F1×L1=F2×L2,
若弹簧测力计的示数变为原来的
| 1 |
| 2 |
| 1 |
| 2 |
| 1 |
| 2 |
故答案为:水平;0;减小两个钩码.
点评:本题考查了学生对杠杆的平衡条件掌握和运用,能利用好动力臂和阻力臂不变是本题的关键.

练习册系列答案
相关题目


 在探究“杠杆的平衡条件”的实验中,将杠杆支在支架上,调节杠杆两端的
在探究“杠杆的平衡条件”的实验中,将杠杆支在支架上,调节杠杆两端的
 涛涛在探究“杠杆的平衡条件”实验中.
涛涛在探究“杠杆的平衡条件”实验中.