题目内容
15.小明同学进行“杠杆的平衡条件”的实验.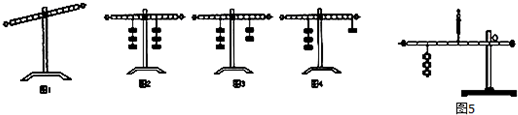
(1)实验前,杠杆静止在图1所示的位置,为使杠杆在水平位置平衡,应该将右端平衡螺母向右(选填“左”或“右”)调节,实验过程中使杠杆水平平衡的目的是便于测量力臂,同时消除杠杆自身重力对杠杆的影响.
(2)调节杠杆水平平衡后,小明进行的三次实验如图2、3、4所示.根据实验,他得出杠杆的平衡条件为“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,下列能帮助他得出正确结论的操作是B.
A.去掉一侧钩码,换用弹簧测力计竖直向下拉
B.去掉一侧钩码,换用弹簧测力计斜向下拉
C.去掉一侧钩码,换用弹簧测力计竖直向上拉
D.增加钩码个数,再多次实验使结论更具普遍性
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图5所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测得的数据与杠杆平衡条件不相符.其原因是:杠杆自重的影响.
分析 (1)杠杆左端下沉,说明杠杆的重心在支点左侧,调节平衡螺母应使杠杆重心右移,这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响;杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂的长度可以直接从杠杆上读出来.
(2)杠杆平衡条件:动力×动力臂=阻力×阻力臂.从支点到动力作用线的垂直距离叫动力臂;从支点到阻力作用线的垂直距离叫阻力臂.力臂不一定是支点到力作用点的距离.探究杠杆平衡条件时,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂,同时杠杆的重心通过支点,消除杠杆自重对杠杆平衡的影响;为得出普遍结论,用弹簧测力计拉杠杆,使力与杠杆不垂直,多做几次实验,得出实验结论.
(3)图5中,支点位于动力和阻力的右侧,弹簧测力计不但提了钩码,而且还提了杠杆,杠杆的重力对杠杆转动产生了影响.
解答 解:
(1)杠杆左端下沉,应将杠杆重心向右移,所以应将两端的平衡螺母(左端和右端的均可)向右调节,直至重心移到支点处,使杠杆重力的力臂为零,这样就减小了杠杆的自重对实验的影响;当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂等于支点到力的作用线的距离,力臂可以从杠杆标尺刻度上直接读出来.
(2)“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,此时的力臂正是支点到力作用点的距离.为得出普遍结论,应改变力的方向使力臂不等于支点到力作用点的距离,多做几次实验,得出实验结论,故正确的实验操作应该是B、去掉一侧钩码,换用弹簧测力计斜向下拉.故选B.
(3)图5中,杠杆的重心不在支点上,杠杆自身的重力对杠杆转动产生了影响,导致拉力F的大小比由杠杆平衡条件计算出来的数值偏大.
故答案为:(1)右;便于测量力臂,同时消除杠杆自身重力对杠杆的影响;(2)B;(3)杠杆自重的影响.
点评 本题考查调节平衡螺母的作用、杠杆实验时动力和阻力的实验要求及根据杠杆平衡条件计算.当杠杆处于水平位置平衡时,竖直作用在杠杆上的力的力臂在杠杆上,倾斜作用在杠杆上力的力臂在杠杆以外的位置上,力臂变小.

(1)如图甲所示的实验电路中,尚缺少一根导线,请用笔画线代替导线,将电路连接完整.

(2)小科按电路图连接电路,进行实验,测得数据如下表所示.断开开关时,才发现电表如图乙所示.电流表出现这种现象的原因是电流表在使用前没有调零.
| U/V | 2 | 2.5 | 3 |
| I/A | 0.22 | 0.26 | 0.30 |
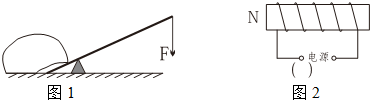
 如图所示是某校厕所出水槽的装置示意图,ABC为一金属杆,A端系有一根细绳,P为活塞,与C端通过细绳相连.活塞P因受到水的压力而将出水口堵住.当用力向下拉动金属杆的A端时,活塞P被拉起使槽内的水冲下.已知A、B两点间的水平距离为15厘米,A、C两点间的水平距离为35厘米,当活塞P刚被拉起时,细绳CP上的拉力为6牛.求此时作用在A端竖直向下的拉力的大小.
如图所示是某校厕所出水槽的装置示意图,ABC为一金属杆,A端系有一根细绳,P为活塞,与C端通过细绳相连.活塞P因受到水的压力而将出水口堵住.当用力向下拉动金属杆的A端时,活塞P被拉起使槽内的水冲下.已知A、B两点间的水平距离为15厘米,A、C两点间的水平距离为35厘米,当活塞P刚被拉起时,细绳CP上的拉力为6牛.求此时作用在A端竖直向下的拉力的大小.
 小明同学探究杠杆平衡条件:(不考虑杠杆自重和摩擦)
小明同学探究杠杆平衡条件:(不考虑杠杆自重和摩擦)(1)实验前没有挂钩码时,小明发现杠杆右端下倾,则应将左端的平衡螺母向左调,使杠杆在水平位置平衡,这样做的目是便于测量力臂.
(2)三次实验数据记录表格如下:
| 实验序号 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 2 | 4 | 2 | 4 |
| 2 | 4 | 6 | 3 | 8 |
| 3 | 3.6 | 8 | 4 | 6 |
(3)小明通过实验探究,得出了杠杆平衡条件是:F1l1=F2l2.
(4)在许多物理实验中,通常也要进行多次实验,如:
①“研究凸透镜成像”时要多次改变物距找像;
②“测量物体长度”时多次测量;
③“研究并联电路电流规律”时换用不同灯泡
多测几组数据;
④“用电压表、电流表测电阻”时,测量多组电压和电流值.其中与小明进行多次实验的目的相同的是D.
A.①②B.②③C.①④D.①③
| A. | 超声波的频率小于人耳能听到的声音频率 | |
| B. | 街道两旁种花植树,可以减弱噪声的产生 | |
| C. | 公共场所要小声交谈,减小声音的响度 | |
| D. | 利用超声波清洗眼镜,利用了声波传递能量的特性 |
 (1)为探究平面镜所成的像与物的大小关系,小勇做了如下操作:他先点燃蜡烛A放在玻璃板前,再拿一只外形相同但不点燃的蜡烛B竖立着在玻璃板后移动,当移动到A像的位置时,发现它与A的像完全重合,这表明平面镜所成像的大小与物的大小相等;
(1)为探究平面镜所成的像与物的大小关系,小勇做了如下操作:他先点燃蜡烛A放在玻璃板前,再拿一只外形相同但不点燃的蜡烛B竖立着在玻璃板后移动,当移动到A像的位置时,发现它与A的像完全重合,这表明平面镜所成像的大小与物的大小相等;