题目内容
9.小红、小明和小燕一起探究杠杆平衡条件的实验:(1)实验前,调节杠杆在水平位置平衡.然后在杠杆的两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,如图甲所示,并测出力臂.多次实验并记录数据.
多次实验的目的是:寻求普遍规律,使得出的结论更具有普遍性.
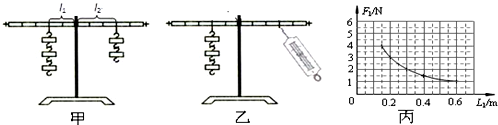
(2)小红将图甲中杠杆两侧的钩码各取下一个,杠杆会左侧下降(选填“右侧下降”或“左侧下降”).
(3)小明在实验时,先在杠杆两侧挂钩码进行实验探究,再用弹簧测力计取代右侧的钩码继续探究,如图乙所示,他这样做的最终目的是C.
A.便于直接读出拉力的大小 B.便于测量力臂的大小 C.便于正确认识力臂
(4)小燕通过实验探究杠杆平衡时动力和动力臂的关系.实验过程中,保持阻力、阻力臂不变,在杠杆水平平衡时,测出每一组动力臂L1和动力F1的数据,并利用实验数据绘制了F1与L1的关系图象,如图丙所示.请根据图象推算,当L1为0.1m时,F1为6N.
分析 (1)实验时,如果只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律;
(2)当左右两侧力与力臂的乘积不相等时,杠杆会转动,直到在新的位置找到平衡;
(3)从支点到力的作用线的距离叫力臂.杠杆平衡的条件:动力×动力臂=阻力×阻力臂,即:F1l1=F2l2;
(4)由于此题中的阻力和阻力臂不变,故据杠杆的平衡条件分析即可解决.
解答 解:(1)探究杠杆平衡的条件时,多次改变力和力臂的大小主要是为了获取多组实验数据归纳出物理规律,使结论具有普遍性.
(2)根据杠杆平衡条件F1L1=F2L2得:
杠杆在水平位置平衡时:左边=3G×2L=6GL;
右边=2G×3L=6GL;
如果在两侧钩码下再各取下一个相同的钩码后:左边=2G×2L=4GL;
右边=G×3L=3GL;
杠杆不再水平平衡,左边会下沉.
(3)从支点到力的作用线的距离叫力臂,在杠杆两侧挂钩码,由于重力的方向是竖直向下的,力臂在杠杆上可以直接读出,当用弹簧测力计拉,若弹簧测力计倾斜时,拉力不再与杠杆垂直,这样力臂会发生变化,相应变短,根据杠杆的平衡条件,力会相应增大,才能使杠杆仍保持平衡,这样做实验可以加深学生对力臂的正确认识;
(4)由于此题中的阻力和阻力臂不变,据F1L1=F2L2可知,利用图象中任意一组数据都能得出,F2L2=F1L1=0.2m×3N=0.6N•m;
故若当L1为0.1m时,F1=$\frac{{F}_{2}{L}_{2}}{{L}_{1}}$=$\frac{0.6N•m}{0.1m}$=6N.
故答案为:(1)寻求普遍规律,使得出的结论更具有普遍性;(2)左侧下降;(3)C;(4)6.
点评 合理运用杠杆平衡条件进行分析,同时明确拉力倾斜时力臂会变小,这也是我们在实验中应该注意的细节.

| A. |  | B. |  | C. |  | D. | 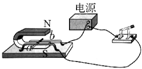 |
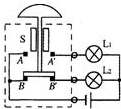 如图所示为一风力报警器原理图,虚线框内是竖直放置的开关S,上端的风力探头通过中心滑杆可带动下端的金属片上下移动(摩擦不计),AA′、BB′是电路中的两组触点.当所测水平风速增大到一定程度后,报警灯亮.图中报警灯是L1(选填“L1”或“L2”)灯,此报警器开关的金属片能上下移动的原因是空气的流速越大,压强越小,当探头受到的升力大于系统的重力时,金属片上升到与AA'接触,报警灯亮.
如图所示为一风力报警器原理图,虚线框内是竖直放置的开关S,上端的风力探头通过中心滑杆可带动下端的金属片上下移动(摩擦不计),AA′、BB′是电路中的两组触点.当所测水平风速增大到一定程度后,报警灯亮.图中报警灯是L1(选填“L1”或“L2”)灯,此报警器开关的金属片能上下移动的原因是空气的流速越大,压强越小,当探头受到的升力大于系统的重力时,金属片上升到与AA'接触,报警灯亮. 取三个相同的羽毛球,并在乙、丙羽毛球内固定不同质量的小金属球.然后让它们从同一高度分别自由落下,用数码相机自动连续拍摄的方法记录羽毛球某一阶段的运动过程,如图所示.已知数码相机连续拍摄时的时间间隔是相等的,该过程中做匀速直线运动的是( )
取三个相同的羽毛球,并在乙、丙羽毛球内固定不同质量的小金属球.然后让它们从同一高度分别自由落下,用数码相机自动连续拍摄的方法记录羽毛球某一阶段的运动过程,如图所示.已知数码相机连续拍摄时的时间间隔是相等的,该过程中做匀速直线运动的是( )| A. | 甲、乙、丙羽毛球 | B. | 只有甲、乙羽毛球 | C. | 只有甲、丙羽毛球 | D. | 只有乙、丙羽毛球 |
| A. | 洒水车在行驶过程中动能始终保持不变 | |
| B. | 车辆行驶过程中,勤劳的环卫工人看到三环路上的彩灯是静止的 | |
| C. | 洒水车受到的重力与地面对它的支撑力是一对相互作用力 | |
| D. | 水不停的洒在地上,给人清凉的感觉,这是因为水蒸发要吸收热量 |
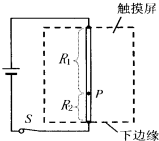 教室里的投影屏选择的是电阻触摸屏,当手指在触摸屏表面施以一定的压力时,触摸屏通过分别识别触摸点的水平与竖直位置,从而确定触摸的位置.以竖直方向为例,触摸屏相当于一根电阻丝,触摸时,触摸点P将电阻丝分为上下两部分,设上部分电阻为R1,下部分电阻为R2,结构可等效为如图所示电路,电源电压不变.下列对电阻触摸屏的分析正确的是( )
教室里的投影屏选择的是电阻触摸屏,当手指在触摸屏表面施以一定的压力时,触摸屏通过分别识别触摸点的水平与竖直位置,从而确定触摸的位置.以竖直方向为例,触摸屏相当于一根电阻丝,触摸时,触摸点P将电阻丝分为上下两部分,设上部分电阻为R1,下部分电阻为R2,结构可等效为如图所示电路,电源电压不变.下列对电阻触摸屏的分析正确的是( )| A. | 电阻触摸屏的工作原理是利用了在材料、横截面积一定时,导体的长度越长,导体的电阻就越小的规律 | |
| B. | 当触摸点竖直向下移动时,R1两端电压减小 | |
| C. | 当触摸点竖直向下移动时,通过 R1的电流仍不变 | |
| D. | 当触摸点在竖直方向移动时,若测得R2两端电压减小,则触摸点P到屏下端的距离增大 |
| A. | 凹透镜--矫正近视眼 | B. | 解剖刀--剖开玉米种子 | ||
| C. | 弹簧秤--测物体质量 | D. | 天文望远镜--观察太阳黑子 |
 如图是某物质熔化时温度随时间变化的图象.这种物质是晶体(选填“晶体”或“非晶体”),该物质的熔点是80℃,熔化过程中,该物质的内能增加(选填“不变”、“增加”或“减少”).
如图是某物质熔化时温度随时间变化的图象.这种物质是晶体(选填“晶体”或“非晶体”),该物质的熔点是80℃,熔化过程中,该物质的内能增加(选填“不变”、“增加”或“减少”).