题目内容
11.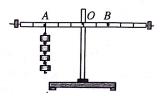 如图所示,小红在研究“杠杆平衡条件”的实验中所用的器材有:杠杆、支架、刻度尺、细线和若干个质量相同的钩码.
如图所示,小红在研究“杠杆平衡条件”的实验中所用的器材有:杠杆、支架、刻度尺、细线和若干个质量相同的钩码.(1)在实验过程中,杠杆调在水平位置平衡的目的为了便于测量力臂大小,同时消除杠杆自重对杠杆平衡的影响.
(2)杠杆调节平衡后,小红在杠杆上A点处挂4个钩码,为使杠杆重新平衡,应在B点挂6个钩码.
(3)小红按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中B(填字母).
A.没有改变力的大小
B.没有改变力的方向
C.没有改变力的作用点
D.实验次数较少,结论具有偶然性.
分析 (1)探究杠杆平衡条件时,杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂的大小,支点过杠杆的重心,消除杠杆重对杠杆平衡的影响;
(2)利用杠杆平衡条件F1L1=F2L2,分析解答;
(3)从支点到动力作用线的垂直距离叫动力臂;从支点到阻力作用线的垂直距离叫阻力臂.
解答 解:(1)杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小,同时消除杠杆重对杠杆平衡的影响.
(2)设一个钩码的重力为G,杠杆上一个小格长度为L,则根据平衡条件可知:4G×3L=nG×2L,
解得n=6(个),故应该在B处挂6个相同的钩码;
(3)由实验可知,“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,也就是实验过程中没有改变动力或阻力的方向.故选项A、C、D错误,选项B正确.
故答案为:(1)便于测量力臂大小,同时消除杠杆自重对杠杆平衡的影响;(2)6; (3)B.
点评 此题考查学生对于杠杆平衡条件的理解和掌握,是中考考查重点实验.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
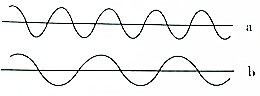 观察声波的图形,找出图中所体现的信息的不同之处,并写出相应结论.
观察声波的图形,找出图中所体现的信息的不同之处,并写出相应结论.
6. 如图,在水平支持面上竖立一根弹簧,弹簧上端顶着一个活塞,活塞和汽缸之间封闭了一定量的气体.已知汽缸和活塞的密封性及导热性都很好并且汽缸和活塞之间没有摩擦.现假设外界大气压强增大而温度不变,则当系统再次达到稳定后,以下正确的是( )
如图,在水平支持面上竖立一根弹簧,弹簧上端顶着一个活塞,活塞和汽缸之间封闭了一定量的气体.已知汽缸和活塞的密封性及导热性都很好并且汽缸和活塞之间没有摩擦.现假设外界大气压强增大而温度不变,则当系统再次达到稳定后,以下正确的是( )
如图,在水平支持面上竖立一根弹簧,弹簧上端顶着一个活塞,活塞和汽缸之间封闭了一定量的气体.已知汽缸和活塞的密封性及导热性都很好并且汽缸和活塞之间没有摩擦.现假设外界大气压强增大而温度不变,则当系统再次达到稳定后,以下正确的是( )| A. | 弹簧长度有所减小 | |
| B. | 汽缸离支持面的距离有所减小 | |
| C. | 缸内气体压强有所增加 | |
| D. | 在“再次达到稳定”的过程中,外界对缸内气体做的功等于缸内气体内能的变化 |
3. 如图所示,电源电压4V(不计内阻),电流表的量程选择0-0.6A,电压表的量程选择0-3V,滑动变阻器的规格是“20Ω 1A”,定值电阻的规格是“10Ω 0.4A”,在保证电路安全的情况下,以下说法正确的是( )
如图所示,电源电压4V(不计内阻),电流表的量程选择0-0.6A,电压表的量程选择0-3V,滑动变阻器的规格是“20Ω 1A”,定值电阻的规格是“10Ω 0.4A”,在保证电路安全的情况下,以下说法正确的是( )
如图所示,电源电压4V(不计内阻),电流表的量程选择0-0.6A,电压表的量程选择0-3V,滑动变阻器的规格是“20Ω 1A”,定值电阻的规格是“10Ω 0.4A”,在保证电路安全的情况下,以下说法正确的是( )| A. | 电流表的示数变化范围0.1A~0.3A | |
| B. | 电压表的示数变化范围是1V~3V | |
| C. | 滑动变阻器阻值的可调范围是$\frac{10}{3}$Ω~20Ω | |
| D. | 定值电阻的电功率变化范围$\frac{8}{45}$W~1.6W |
 画出如图中的光线经凸透镜折射后进入水中的大致光路(凸透镜的主光轴与水面重合).
画出如图中的光线经凸透镜折射后进入水中的大致光路(凸透镜的主光轴与水面重合).