题目内容
7.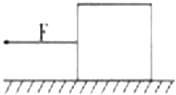 如图所示,一木块在一水平拉力F作用下沿水平面做匀速直线运动,如果知道物体受到的摩擦力为15N,则水平拉力F的大小是15N;如果某一时刻起,小车所受的所有力全部消失,那么这辆小车将会(选填“会”或“不会”)继续做匀速直线运动.
如图所示,一木块在一水平拉力F作用下沿水平面做匀速直线运动,如果知道物体受到的摩擦力为15N,则水平拉力F的大小是15N;如果某一时刻起,小车所受的所有力全部消失,那么这辆小车将会(选填“会”或“不会”)继续做匀速直线运动.
分析 物体处于静止状态或匀速直线运动状态时,受平衡力的作用;
根据牛顿第一定律,如果物体不受力,将保持静止状态或匀速直线运动状态不变.
解答 解:
木块在拉力F作用下沿水平面做匀速直线运动,所以受到的拉力与摩擦力平衡,则F=f=15N;
木块在运动过程中,若木块所受的所有力全部消失,木块将做匀速直线运动.
故答案为:15;会.
点评 本题主要考查了二力平衡条件的应用及对牛顿第一定律的理解,关键注意题目中的“匀速直线”及力消失前木块的运动状态.

练习册系列答案
相关题目
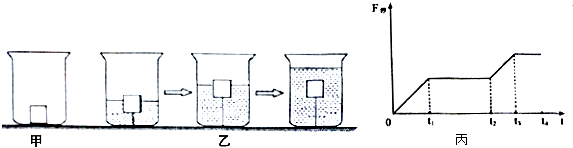
 小华同学通过实验探究某液体内部的压强与液体深度的关系,根据实验数据绘出了图象,如图所示,g取10N/kg,分析可知:该液体50cm深处的压强是3750Pa.
小华同学通过实验探究某液体内部的压强与液体深度的关系,根据实验数据绘出了图象,如图所示,g取10N/kg,分析可知:该液体50cm深处的压强是3750Pa.
18.光的世界变化莫测,奥妙无穷.如图中所示光学现象的描述或解释正确的是( )
| A. |  桥在水中的合影是光的反射形成的 | |
| B. |  海面上形成海市蜃楼是光的直线传播造成的 | |
| C. |  人配戴的凹透镜可以矫止远视眼 | |
| D. |  人的眼镜被凸透镜放大是照相机原理的应用 |
15.阿基米德说:“给我一个支点和一根足够长的棍,我可以撬动整个地球.”下列生产和生活中的杠杆应用与阿基米德设想的杠杆属于同一类型的是( )
| A. |  扫帚 | B. |  自行车车闸 | C. |  镊子 | D. |  钓鱼竿 |
 2015年6月1日晚,“东方之星”客船翻沉,这是一起突发罕见的强对流天气带来的强风暴雨袭山导致的特别重大灾难性事件,事发当时岳阳迅速行动,多部门积极参与搜救,参与搜救的某型号冲锋舟(如图)质量为180kg,g取10N/kg.求:
2015年6月1日晚,“东方之星”客船翻沉,这是一起突发罕见的强对流天气带来的强风暴雨袭山导致的特别重大灾难性事件,事发当时岳阳迅速行动,多部门积极参与搜救,参与搜救的某型号冲锋舟(如图)质量为180kg,g取10N/kg.求:
12. 小明同学在“探究杠杆平衡条件”的实验中,
小明同学在“探究杠杆平衡条件”的实验中,
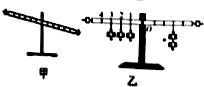
(1)小明将实验装置放在水平桌面上,发现杠杆右端下倾,如图甲所示,应将右端的平衡螺母向左(选填“左”或“右”)调节,使杠杆在水平位置平衡,这样方便测量力臂.
(2)实验中,小明发现用图乙所示的方式悬挂钩码(每个钩码的重力均为0.5N),杠杆也能平衡(杠杆上毎格等距为5cm),但老师提醒小明不要采用这种方式,这主要是因为该种方式C.
A.力臂与杠杆不重合 B.一个人无法独立操作 C.力和力臂数目过多 D.需要使用太多的钩码
(3)小明改变了如图乙所示的悬挂钩码的方式,在不改变支点O右侧所挂的两个钩码及其位置的情况下,保持左侧第2格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆也可以在水平位置平衡,小明同学将得到的实验数据记录在下表中:
请将表格中的数据补充完整.
(4)小明根据表中的数据得出杠杆平衡条件为:“动力×动力臂=阻力×阻力臂”,同组的小红同学认为应该多次改变力和力臂的大小进行实验,再得出实验结论,这样做的目的是B
A.避免杠杆自身重力对实验的影响
B.获取多组实验数据归纳出物理规律
C.使每组数据更准确
D.多次测量求平均值减小误差.
小明同学在“探究杠杆平衡条件”的实验中,(1)小明将实验装置放在水平桌面上,发现杠杆右端下倾,如图甲所示,应将右端的平衡螺母向左(选填“左”或“右”)调节,使杠杆在水平位置平衡,这样方便测量力臂.
(2)实验中,小明发现用图乙所示的方式悬挂钩码(每个钩码的重力均为0.5N),杠杆也能平衡(杠杆上毎格等距为5cm),但老师提醒小明不要采用这种方式,这主要是因为该种方式C.
A.力臂与杠杆不重合 B.一个人无法独立操作 C.力和力臂数目过多 D.需要使用太多的钩码
(3)小明改变了如图乙所示的悬挂钩码的方式,在不改变支点O右侧所挂的两个钩码及其位置的情况下,保持左侧第2格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆也可以在水平位置平衡,小明同学将得到的实验数据记录在下表中:
| 实验次数 | 动力F1/N | 动力臂L1/cm | 动力×动力臂/N•cm | 阻力F1/N | 阻力臂L2/cm | 阻力×阻力臂/N•cm |
| 1 | 10 | 15 | 1 | 15 |
(4)小明根据表中的数据得出杠杆平衡条件为:“动力×动力臂=阻力×阻力臂”,同组的小红同学认为应该多次改变力和力臂的大小进行实验,再得出实验结论,这样做的目的是B
A.避免杠杆自身重力对实验的影响
B.获取多组实验数据归纳出物理规律
C.使每组数据更准确
D.多次测量求平均值减小误差.
19.下列实例中,目的是为了减小摩擦的是( )
| A. | 足球守门员戴有防滑手套 | B. | 骑自行车的人刹车时用力捏闸 | ||
| C. | 用力压橡皮,擦去写错的字 | D. | 移动重物时,在它下面垫上钢管 |