题目内容
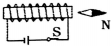
18.画出图中光线由三棱镜射向空气的折射光线.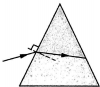
分析 根据光的折射定律作出光路图:光从空气中斜射入玻璃中时,折射角小于入射角;光从玻璃斜射入空气中时,折射角大于入射角.
解答 解:第二条光线是光从玻璃斜射入空气中,折射光线向远离法线的方向偏折,即折射光线向三棱镜的底边偏折.如下图所示: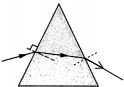
点评 画光的折射光路图应首先明确在介质转换时,折射角与入射角的变化情况,确定光线是远离还是靠近法线,这样才能更准确地表示出光的传播路径.

练习册系列答案
相关题目
14.关于热、内能和温度,下列说法中,正确的有( )
| A. | 物体内能增加,温度一定升高 | |
| B. | 物体放出热量,温度一定降低 | |
| C. | 物体温度降低的越多,放出热量就越多 | |
| D. | 质量相同的两个物体,温度升高得多的物体吸收的热量一定多 |
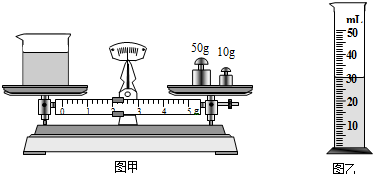 在“用天平和量筒测量盐水密度”的实验中:
在“用天平和量筒测量盐水密度”的实验中:
6.小冉在探究“浮力大小与哪些因素有关”的实验中,用到如下器材:分度值为0.1 N的弹簧测力计,底面积为5 cm2、高度为6 cm的实心圆柱体铜块,相同的大烧杯若干,水,密度未知的某种液体,细线等.
(1)小冉进行了如图所示的实验:A步骤所示弹簧测力计的示数为2.7N;用弹簧测力计挂着铜块缓慢地浸入液体中不同深度,步骤如图B、C、D、E、F所示(液体均未溢出),并将其示数记录在如表中:
(2)在实验步骤中B中铜块所受浮力F浮=0.1N.
(3)分析实验步骤A、B、C、D,可以说明浮力大小跟排开液体的体积有关.
(4)小冉用表格中的数据算出了某种液体的密度是1.3×103kg/m3(结果保留二位有效数字),还算出了步骤B中铜块下表面受到水的压强是200Pa.
(5)小冉在步骤B的基础上继续探究:保持铜块下表面所处的位置不变,把弹簧测力计的拉环固定在铁架台上,缓慢向烧杯内加水,发现弹簧测力计的示数逐渐减小(填“增大”或“减小”);当所加水使铜块刚好浸没时(水未溢出),烧杯底部受到水的压强增加了420Pa.(已知在一定范围内,弹簧受到的拉力每减少0.1 N,弹簧的长度就缩短0.1 cm)
(1)小冉进行了如图所示的实验:A步骤所示弹簧测力计的示数为2.7N;用弹簧测力计挂着铜块缓慢地浸入液体中不同深度,步骤如图B、C、D、E、F所示(液体均未溢出),并将其示数记录在如表中:
| 实验步骤 | B | C | D | E | F |
| 弹簧测力计示数/N | 2.6 | 2.5 | 2.4 | 2.4 | 2.3 |
(3)分析实验步骤A、B、C、D,可以说明浮力大小跟排开液体的体积有关.
(4)小冉用表格中的数据算出了某种液体的密度是1.3×103kg/m3(结果保留二位有效数字),还算出了步骤B中铜块下表面受到水的压强是200Pa.
(5)小冉在步骤B的基础上继续探究:保持铜块下表面所处的位置不变,把弹簧测力计的拉环固定在铁架台上,缓慢向烧杯内加水,发现弹簧测力计的示数逐渐减小(填“增大”或“减小”);当所加水使铜块刚好浸没时(水未溢出),烧杯底部受到水的压强增加了420Pa.(已知在一定范围内,弹簧受到的拉力每减少0.1 N,弹簧的长度就缩短0.1 cm)


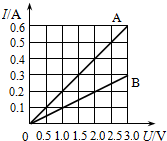 在某一温度下,两个电阻元件A和B中的电流与其两端电压的关系如图所示,则由图可知,元件A的电阻为5Ω,元件B的电阻为10Ω,将A和B并联后接在电压为2.0V的电源两端,则通过A和B的总电流是0.6A.
在某一温度下,两个电阻元件A和B中的电流与其两端电压的关系如图所示,则由图可知,元件A的电阻为5Ω,元件B的电阻为10Ω,将A和B并联后接在电压为2.0V的电源两端,则通过A和B的总电流是0.6A.
10. 水平桌面上,甲、乙两相同的杯中盛有不同浓度的盐水,现将两相同的物块分别放入杯中,待物块静止时,两杯中液面恰好相平,如图所示,则( )
水平桌面上,甲、乙两相同的杯中盛有不同浓度的盐水,现将两相同的物块分别放入杯中,待物块静止时,两杯中液面恰好相平,如图所示,则( )
水平桌面上,甲、乙两相同的杯中盛有不同浓度的盐水,现将两相同的物块分别放入杯中,待物块静止时,两杯中液面恰好相平,如图所示,则( )| A. | 甲杯中物块受到浮力较大 | |
| B. | 乙杯底部受到液体的压强较小 | |
| C. | 甲杯中物块对杯底的压力等于物块重力 | |
| D. | 乙杯中物块所受到的浮力等于物块重力 |
7.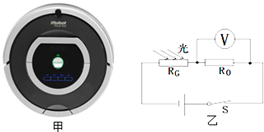 扫地机器人是一款能自动清扫的智能家用电器,如图甲.
扫地机器人是一款能自动清扫的智能家用电器,如图甲.
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.
表一:
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差.风量指单位时间内通过吸尘电机排出的空气体积.吸尘电机吸入功率与输入功率的比值叫做效率.
表二:
(1)机器人工作时,主机内部的气压小于(选填“大于”、“小于”或“等于”)大气压而产生吸力.若该机器人向障碍物垂直发射超声波,经过0.001s收到回波,则其发射超声波时与障碍物间的距离约为17cm.(设超声波在空气中的传播速度为340m/s)
(2)下列说法中错误的是B.
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)该机器人正常工作时的电流为2.5A;充满电后至下一次自动充电前能够连续正常工作的最长时间为48min.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,10min内通过吸尘电机提出的空气质量为11.7kg.(取ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω;为监测空气的透光程度,要将电压表表盘的相关刻度值转化为对应的总阻值(R0+RG),则转化后表盘上从左到右刻度线对应的阻值将减小(选填“增大”、“不变”或“减小”).
扫地机器人是一款能自动清扫的智能家用电器,如图甲.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.
表一:
| 额定工作电压 | 12V | 额定功率 | 30W |
| 电池容量 | 2500mAh | 工作噪音 | <50dB |
表二:
| 真空度(Pa) | 400 | 450 | 500 | 550 | 600 |
| 风量(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
| 吸入功率(W) | 10.00 | 9.00 | 8.50 | 7.80 |
(2)下列说法中错误的是B.
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)该机器人正常工作时的电流为2.5A;充满电后至下一次自动充电前能够连续正常工作的最长时间为48min.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,10min内通过吸尘电机提出的空气质量为11.7kg.(取ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω;为监测空气的透光程度,要将电压表表盘的相关刻度值转化为对应的总阻值(R0+RG),则转化后表盘上从左到右刻度线对应的阻值将减小(选填“增大”、“不变”或“减小”).
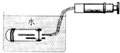
8.某课外物理合作探究小组制作了如图所示的潜水艇模型,下列说法正确的是( )
| A. | 潜艇模型下沉的时候,受到的水的压强不变 | |
| B. | 向外拉注射器活塞,试管内水量适当时,可实现潜艇悬浮 | |
| C. | 向内推注射器活塞,水会被压入试管中,可实现潜艇下沉 | |
| D. | 潜艇模型的试管上绕铁丝,目的是为了增大在水中的浮力 |