题目内容
2.(1)指出每一幅图的现象及用相应的物理知识进行解释:例如:图1现象:人推船,人自身也动了.解释:力的作用是相互的.
图2现象:弓被拉弯,解释:力可以改变物体的形状.
(2)生活中一些看似平常的工具却蕴含这丰富的物理知识,如图所示的夹钳就是其中一例,图3中①齿状钳口;②刀口;③转轴;④手柄;⑤带齿纹的橡胶柄套,请简要说出其中各应用了什么物理知识(任写3条)
摩擦力,压强,杠杆.

分析 (1)力的作用效果有二:改变物体的形状,改变物体的运动状态;
(2)齿状钳口涉及到压强和摩擦力;刀口涉及到压强;转轴涉及到杠杆;手柄涉及到杠杆;带齿纹的橡胶柄套涉及到绝缘体和摩擦力.
解答 解:
(1)弓在运动员拉力的作用下形状发生改变,说明力可以改变物体的形状.
(2)齿形钳口:①使接触面变粗糙,在压力一定时,增大摩擦力;
②刀口薄:压力一定,减小受力面积,增大压强;
③④:夹钳是一个省力杠杆;
齿形橡胶柄套:⑤橡胶为绝缘体,防止触电;
压力一定,增大接触面的粗糙程度增大摩擦力.
故答案为:(1)弓被拉弯;力可以改变物体的形状;
(2)摩擦力;压强;杠杆.
点评 解答此类图片问题时,一定认真审题,确定对应的物理知识点,不要张冠李戴.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
12. 如图所示是“探究凸透镜成像规律”的实验装置.
如图所示是“探究凸透镜成像规律”的实验装置.
(1)点燃蜡烛后,调节凸透镜和光屏使它们的中心跟烛焰的中心大致在同一高度,目的是使像成在光屏的中央.
(2)蜡烛恰好在光屏上成倒立、等大的像时如图所示,则所选的凸透镜可能是如表格中的乙(填“甲”或“乙”)凸透镜.
如图所示是“探究凸透镜成像规律”的实验装置.(1)点燃蜡烛后,调节凸透镜和光屏使它们的中心跟烛焰的中心大致在同一高度,目的是使像成在光屏的中央.
(2)蜡烛恰好在光屏上成倒立、等大的像时如图所示,则所选的凸透镜可能是如表格中的乙(填“甲”或“乙”)凸透镜.
| 序号 | 直径/cm | 焦距/cm |
| 甲 | 10 | 30 |
| 乙 | 5 | 10 |

17.关于伽利略的理想实验,下列说法中正确的是( )
| A. | 虽然是想象中的实验,但它是建立在可靠的事实基础上的 | |
| B. | 该实验永远不可能实现,因此没有任何使用价值 | |
| C. | 实验说明物体不受外力或合外力为零时,只能保持匀速直线运动状态 | |
| D. | 实验说明要物体禁止就必须有力的作用,没有力作用的物体就运动 |
7.在学习电学时,小夏利用如图1所示的电路图,做了不少实验,其中电阻R可选用阻值分别为10Ω、20Ω、30Ω的定值电阻.
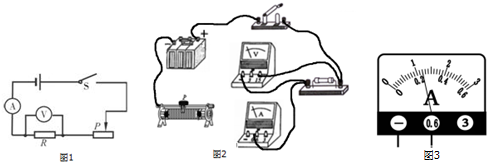
(1)在做“探究电流与电阻的关系”的实验时,小夏先把10Ω的电阻连入电路,闭合开关,发现电流表有较大示数,电压表没有示数,若故障只出现在电阻R或变阻器上,则出现这种现象的原因是电阻R短路;排除故障后,小夏把电流表的读数填在表格中,然后把10Ω电阻分别换成20Ω、30Ω电阻,将相应的电流值记录到表1中,小夏的做法错误是没有控制定值电阻R两端的电压不变.
(2)在做“伏安法”测电阻的实验时,请用笔画线代替导线完成图2中的电路连接,要求滑动变阻器滑片向右移时,连入电路中的阻值变大.实验中测得的结果如图2表格.由此可以判断,在实验中小夏选用了阻值为10Ω的定值电阻.
(3)在做“测量小灯泡额定功率”的实验时,小夏用额定电压为“3V”的小灯泡代替电路图中的电阻R,连接好电路后,闭合开关,移动滑动变阻器的滑片,使小灯泡正常发光,此时电流表的示数如图3所示,则电流表的读数是0.24A,小灯泡的额定功率为0.72W.
(1)在做“探究电流与电阻的关系”的实验时,小夏先把10Ω的电阻连入电路,闭合开关,发现电流表有较大示数,电压表没有示数,若故障只出现在电阻R或变阻器上,则出现这种现象的原因是电阻R短路;排除故障后,小夏把电流表的读数填在表格中,然后把10Ω电阻分别换成20Ω、30Ω电阻,将相应的电流值记录到表1中,小夏的做法错误是没有控制定值电阻R两端的电压不变.
| 电阻R/Ω | 10 | 20 | 30 |
| 电流I/A | 0.3 | 0.2 | 0.15 |
| 实验序号 | 电压表示数/V | 电流表示数/A |
| 1 | 1.5 | 0.16 |
| 2 | 2.5 | 0.25 |
| 3 | 3.5 | 0.34 |
14.下列有关力的说法中,正确的是( )
| A. | 力的作用效果与力的大小、方向和作用点都有关系 | |
| B. | 弹簧被拉伸时产生的力是弹力,钢丝绳悬挂重物的力不是弹力 | |
| C. | 手拍桌子时,手对桌子施加了力,桌子对手没有施加力 | |
| D. | 重力的方向总是垂直向下 |
11.下列关于功、功率和机械效率的说法中正确的是( )
| A. | 省力的机械一定不省功 | |
| B. | 做功多的机械功率一定大 | |
| C. | 机械效率高的机械,功率一定大 | |
| D. | 有用功一定时,额外功少的机械,机械效率一定高 |
12. 在“研究杠杆平衡条件”的实验中:
在“研究杠杆平衡条件”的实验中:
(1)先把杠杆的中点支在支架上,杠杆停在如图所示的位置,此时调节平衡螺母使杠杆在水平位置平衡,这样做是为了避免杠杆自重对杠杆平衡的影响、便于读出力臂的长度
(2)在实验中,多次改变力和力臂的大小是为了C(选填序号)
A.减小摩擦 B.使每组数据更精确
C.获得多组数据归纳出物理规律 D.多次测量取平均值减小误差
(3)某同学在做该实验时,设计了下面的表格,请帮助他把表格的空格填好,其数值为0.49N.
在“研究杠杆平衡条件”的实验中:(1)先把杠杆的中点支在支架上,杠杆停在如图所示的位置,此时调节平衡螺母使杠杆在水平位置平衡,这样做是为了避免杠杆自重对杠杆平衡的影响、便于读出力臂的长度
(2)在实验中,多次改变力和力臂的大小是为了C(选填序号)
A.减小摩擦 B.使每组数据更精确
C.获得多组数据归纳出物理规律 D.多次测量取平均值减小误差
(3)某同学在做该实验时,设计了下面的表格,请帮助他把表格的空格填好,其数值为0.49N.
| 动力(牛) | 动力臂(米) | 阻力(牛) | 阻力臂(米) | |
| 1 | 1.96 | 0.04 | 3.92 | 0.02 |
| 2 | 0.06 | 0.98 | 0.03 | |
| 3 | 2.45 | 0.03 | 1.47 | 0.05 |