题目内容
15. 如图是我国自主研发的四轮长航程极地漫游机器人,科考队员在附近遥控机器人.机器人质量为500kg,履带与地面的接触面积约为0.4m2.机器人首次在南极内陆冰盖完成了27km的自主行走.
如图是我国自主研发的四轮长航程极地漫游机器人,科考队员在附近遥控机器人.机器人质量为500kg,履带与地面的接触面积约为0.4m2.机器人首次在南极内陆冰盖完成了27km的自主行走.求:(1)机器人的重力;
(2)机器人静止在水平冰面上时,对冰面的压强;
(3)本次自主行走共耗时30min,它的平均速度为多少?
分析 (1)已知质量,利用G=mg可求机器人的重力;
(2)机器人静止在水平冰面上时,对冰面的压力等于其自身重力,利用p=$\frac{F}{S}$求解压强;
(3)已知时间和路程,利用v=$\frac{s}{t}$可求速度.
解答 解:(1)机器人的重力:
G=mg=500kg×10N/kg=5000N;
(2)机器人静止在水平冰面上时,对冰面的压力:
F=G=5000N,
对冰面的压强:
p=$\frac{F}{S}$=$\frac{5000N}{0.4{m}^{2}}$=12500Pa;
(3)平均速度:
v=$\frac{s}{t}$=$\frac{27km}{0.5h}$=54km/h.
答:(1)机器人的重力为5000N;
(2)机器人静止在水平冰面上时,对冰面的压强为12500Pa;
(3)它的平均速度为54km/h.
点评 此题考查重力、压强和速度的计算,关键是知道静止在水平面上的物体对水平面的压力等于其自身重力,计算过程中要注意单位的统一.

练习册系列答案
相关题目
15.如下图所示的四种测量器具中,不能直接测量物体质量的器具是( )
| A. |  托盘天平 | B. |  电子天平 | C. |  弹簧测力计 | D. |  案秤 |
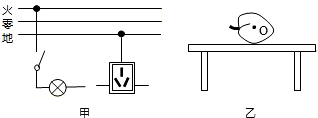
16.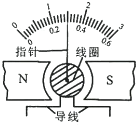 如图为实验室常用电流表的内部结构图.多匝金属线圈悬置在磁体的两极间,线圈与一根指针相连.当线圈中有电流通过时,它受力转动带动指针偏转,便可显示出电流的大小.下列与此工作原理相同的电器设备是( )
如图为实验室常用电流表的内部结构图.多匝金属线圈悬置在磁体的两极间,线圈与一根指针相连.当线圈中有电流通过时,它受力转动带动指针偏转,便可显示出电流的大小.下列与此工作原理相同的电器设备是( )
如图为实验室常用电流表的内部结构图.多匝金属线圈悬置在磁体的两极间,线圈与一根指针相连.当线圈中有电流通过时,它受力转动带动指针偏转,便可显示出电流的大小.下列与此工作原理相同的电器设备是( )| A. | 电烙铁 | B. | 电铃 | C. | 发电机 | D. | 电动机 |
10.小明同学想对如图1所示的电路进行深入研究,他进行了如下尝试:
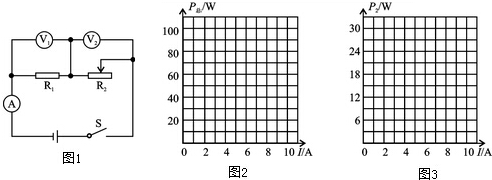
(1)首先他分析出:若已知电源电压恒为U,定值电阻R1的阻值为R0,某时刻电路中的电流为I,则滑动变阻器R2两端的电压U2=U-IR0;滑动变阻器R2的电功率P2=UI-I2R0.
(2)他按照电路图连接了实验电路,调节滑动变阻器的滑片,相应的记录了电流表、电压表V1和V2的示数,测出R1的电功率P1、滑动变阻器R2的电功率P2、电路的总功率P总,请根据表中数据分别在图2和图3中描点画出图象
(3)分析图象
由图2可得结论电路总功率P总与电流I成正比;.
由图2可得结论当电流增大时,滑动变阻器的功率先增大后减小.
(1)首先他分析出:若已知电源电压恒为U,定值电阻R1的阻值为R0,某时刻电路中的电流为I,则滑动变阻器R2两端的电压U2=U-IR0;滑动变阻器R2的电功率P2=UI-I2R0.
(2)他按照电路图连接了实验电路,调节滑动变阻器的滑片,相应的记录了电流表、电压表V1和V2的示数,测出R1的电功率P1、滑动变阻器R2的电功率P2、电路的总功率P总,请根据表中数据分别在图2和图3中描点画出图象
(3)分析图象
由图2可得结论电路总功率P总与电流I成正比;.
由图2可得结论当电流增大时,滑动变阻器的功率先增大后减小.
| I/A | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| U1/V | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| U2/V | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| P1/W | 1 | 4 | 9 | 16 | 25 | 36 | 49 | 64 | 81 | 100 |
| P2/W | 9 | 16 | 21 | 24 | 25 | 24 | 21 | 16 | 9 | 0 |
| P总/W | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
20.下列说法中正确的是( )
| A. | 物体速度越大,惯性越大 | B. | 船闸是利用连通器原理工作的 | ||
| C. | 大气压强随高度的增加而增大 | D. | 流体流速越小,压强越小 |
7.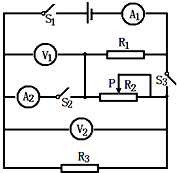 如图所示的电路中,电源两端的电压保持不变.只闭合开关S1时,将滑动变阻器的滑片移至最左端,电流表A1的示数为1.2A,再将滑片移至最右端,电压表V2的示数变化了4V,电流表A1的示数变化了0.8A;只闭合开关S1、S2时,电路消耗的功率为P,只闭合开关S1、S3时,电路消耗的功率为P′.已知P:P′=1:2.若将开关S1、S2和S3都闭合,则下列说法正确的是( )
如图所示的电路中,电源两端的电压保持不变.只闭合开关S1时,将滑动变阻器的滑片移至最左端,电流表A1的示数为1.2A,再将滑片移至最右端,电压表V2的示数变化了4V,电流表A1的示数变化了0.8A;只闭合开关S1、S2时,电路消耗的功率为P,只闭合开关S1、S3时,电路消耗的功率为P′.已知P:P′=1:2.若将开关S1、S2和S3都闭合,则下列说法正确的是( )
如图所示的电路中,电源两端的电压保持不变.只闭合开关S1时,将滑动变阻器的滑片移至最左端,电流表A1的示数为1.2A,再将滑片移至最右端,电压表V2的示数变化了4V,电流表A1的示数变化了0.8A;只闭合开关S1、S2时,电路消耗的功率为P,只闭合开关S1、S3时,电路消耗的功率为P′.已知P:P′=1:2.若将开关S1、S2和S3都闭合,则下列说法正确的是( )| A. | R1、R3的阻值分别为2.5Ω、5Ω | B. | 电压表V1的示数始终为18V | ||
| C. | 电流表A2最小示数为0.6A | D. | 电路消耗的最小功率为108W |
