题目内容
13.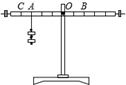 小明利用刻度均匀的匀质杠杆“探究杠杆的平衡条件”,如图所示,每个钩码重为0.5N.
小明利用刻度均匀的匀质杠杆“探究杠杆的平衡条件”,如图所示,每个钩码重为0.5N.(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端偏高,应向左端调节平衡螺母,使杠杆在水平位置平衡.
(2)在A点悬挂两个钩码,要使杠杆在水平位置平衡,需在B点悬挂3个钩码.
(3)取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上拉,使杠杆水平位置平衡.若改变弹簧测力计拉力的方向,使之斜向左上方,杠杆仍然在水平位置平衡,则测力计的读数将变大(变大/变小/不变),原因是拉力的力臂变小.
(4)小明利用此杠杆用1.6N的拉力将四个钩码匀速升高18cm,拉力方向移动的距离为25cm,杠杆的机械效率为90%,产生额外功的原因是克服杠杆与支点间摩擦及杠杆自重做额外功.
分析 (1)杠杆左端高,说明杠杆的重心在支点右侧,调节平衡螺母应使杠杆重心左移;
(2)由杠杆平衡条件:动力×动力臂=阻力×阻力臂.可计算出所挂钩码的大小和弹簧测力计的拉力;
(3)阻力和阻力臂不变时,动力臂减小,动力增大;
(4)在实验中,弹簧测力计向上拉力做的功是总功,克服钩码重力做的功是有用功,克服摩擦以及杠杆自重做的功是额外功;杠杆的机械效率可以根据公式η=$\frac{{W}_{有}}{{W}_{总}}$=$\frac{Gh}{Fs}$来计算.
解答 解:
(1)杠杆左端高,说明杠杆重心偏右,应将平衡螺母(左端和右端的均可)向左调节,使杠杆在水平位置平衡;
(2)杠杆平衡后,若在A点挂2个钩码,则左边点重力为2G;
又因为力臂OA=3,左边力臂OB=2,
所以由杠杆的平衡条件(F1l1=F2l2)可知:
2G×3=FB×2.
解得FB=3G,故应在B点应挂3个钩码,才能使杠杆恢复平衡.
一个钩码的重是0.5N,
根据杠杆平衡条件F1L1=F2L2得,
1N×3=FC×4,FC=1.5N,即在B处挂3个钩码.
(3)根据杠杆平衡条件F1L1=F2L2可知,
如改变弹簧测力计拉力的方向,使之斜向左上方,阻力和阻力臂不变,动力臂减小,动力要增大,所以弹簧测力计示数变大,才能使杠杆仍然水平平衡;
(4)杠杆的机械效率是:η=$\frac{{W}_{有}}{{W}_{总}}$=$\frac{Gh}{Fs}$=$\frac{2N×0.18m}{1.6N×0.25m}$×100%=90%;
利用杠杆提升物体时,克服摩擦以及杠杆自重做额外功.
故答案为:(1)左;(2)3;(3)变大;拉力的力臂变小;(4)90%;克服杠杆与支点间摩擦及杠杆自重多做额外功.
点评 本题考查了杠杆平衡的调节和平衡条件的应用;要明确探究杠杆平衡条件时,使杠杆在水平位置平衡,便于测量力臂大小,杠杆的重心通过支点,消除杠杆重对杠杆平衡的影响,使实验简单化,便于探究.

 小猴和小白兔同时发现了一个实心胡萝卜,它们都想多分点.小猴提出分配方案:将胡萝卜放在三角形石块的尖端,调节胡萝卜位置,使胡萝卜静止时保持水平,然后沿支点处竖直切开,各拿一份,如图甲所示.小白兔说:“我要长的那一头!”,小猴却暗自高兴.请问:
小猴和小白兔同时发现了一个实心胡萝卜,它们都想多分点.小猴提出分配方案:将胡萝卜放在三角形石块的尖端,调节胡萝卜位置,使胡萝卜静止时保持水平,然后沿支点处竖直切开,各拿一份,如图甲所示.小白兔说:“我要长的那一头!”,小猴却暗自高兴.请问: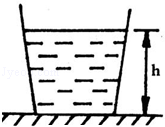 如图所示,一个重4N,底面积为50cm2的容器置于水平桌面上,里面装有10N的水,容器中水的深度为16cm.求:
如图所示,一个重4N,底面积为50cm2的容器置于水平桌面上,里面装有10N的水,容器中水的深度为16cm.求:
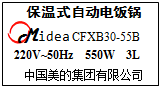 各国家庭电路的电压可能是不一样的,晓丽留学的日本,家庭电路的电压只有110V.妈妈去看她时从国内带去了一个电饭锅,在日本使用时却发现这个电饭锅好象“变懒了”,煮熟同样一锅饭需要的时间比在国内时长了许多.晓丽查看电饭锅铭牌(如图所示)后,才恍然大悟.设电饭锅电阻值不变,请你帮助晓丽计算判断:
各国家庭电路的电压可能是不一样的,晓丽留学的日本,家庭电路的电压只有110V.妈妈去看她时从国内带去了一个电饭锅,在日本使用时却发现这个电饭锅好象“变懒了”,煮熟同样一锅饭需要的时间比在国内时长了许多.晓丽查看电饭锅铭牌(如图所示)后,才恍然大悟.设电饭锅电阻值不变,请你帮助晓丽计算判断: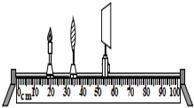 如图所示,在探究“凸透镜成像规律”的实验中,依次将点燃的蜡烛、凸透镜、光屏放在光具座上,调节烛焰、凸透镜、光屏的中心大致在同一高度.如表是小华同学实验时记录的几组数据:
如图所示,在探究“凸透镜成像规律”的实验中,依次将点燃的蜡烛、凸透镜、光屏放在光具座上,调节烛焰、凸透镜、光屏的中心大致在同一高度.如表是小华同学实验时记录的几组数据:| 实验次数 | 物距u/cm | 像距v/cm |
| 1 | 30 | 15 |
| 2 | 20 | 20 |
| 3 | 15 | 30 |
| 4 | 5 | / |
(2)当光屏上得到一个倒立缩小的实像时,保持透镜的位置不变,要使屏上的像变大些,应将蜡烛靠近透镜.(选填“靠近”或“远离”)
(3)第1次实验时,小华将一近视眼镜紧贴在凸透镜的前面,要在光屏上再次得到清晰的像,应将光屏向远离(选填“靠近”或“远离”)透镜方向移动.
 如图所示是一种电热水龙头和它的电路简图.旋转手柄可使扇形开关S同时接触两个相邻触点,从而控制流出的水为冷水、温水或热水.已知R1、R2是电热丝,R2=55Ω,温水档的电功率是2.2kW.C水=4.2×103 J/(kg•℃)试解答下列问题:
如图所示是一种电热水龙头和它的电路简图.旋转手柄可使扇形开关S同时接触两个相邻触点,从而控制流出的水为冷水、温水或热水.已知R1、R2是电热丝,R2=55Ω,温水档的电功率是2.2kW.C水=4.2×103 J/(kg•℃)试解答下列问题: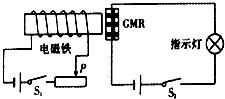 法国科学家阿尔贝•费尔和德国彼得•格林贝格尔由于发现了巨磁电阻(GMR)效应,荣获了2007年诺贝尔物理学奖.如图是研究巨磁电阻特性的原理示意图.实验发现,闭合S1、S2后,当滑片P向左滑动的过程中,指示灯明显变亮,则下列说法正确的是( )
法国科学家阿尔贝•费尔和德国彼得•格林贝格尔由于发现了巨磁电阻(GMR)效应,荣获了2007年诺贝尔物理学奖.如图是研究巨磁电阻特性的原理示意图.实验发现,闭合S1、S2后,当滑片P向左滑动的过程中,指示灯明显变亮,则下列说法正确的是( )| A. | 滑片P向左滑动过程中,通过电磁体的电流变小 | |
| B. | 巨磁电阻的阻值随磁场的增强而明显减小 | |
| C. | 滑片P向右滑动过程中电磁铁的磁性增强 | |
| D. | 电磁铁右端为N极 |
 某同学在“探究物质的密度”的实验中,
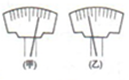
某同学在“探究物质的密度”的实验中,(1)他将托盘天平放在水平桌面上,把游码移到标尺左端“0”刻度线处,观察指针的指示情况如图(甲)所示,此时应进行的操作是向左移动平衡螺母;天平横梁平衡后,在称物体的质量时,他在天平右盘中加减砝码后,指针的指示情况如图(乙)所示这时他应进行的操作是向右移动标尺上的游码.
(2)下表是这位同学记录的实验内容和实验数据,请你根据表格中记录的内容和数据,进行分析比较
| 物质 | 实验次数 | 体积 (cm3) | 质量(g) | 质量与体积的比值 (g/cm3) |
| 铁块 | 1 | 10 | 79 | 7.9 |
| 2 | 20 | 158 | 7.9 | |
| 3 | 30 | 237 | 7.9 | |
| 铝块 | 4 | 0 | 54 | 2.7 |
| 5 | 40 | 108 | 2.7 | |
| 6 | 60 | 162 | 2.7 |
②将1、2、3次实验数据和4、5、6次实验数据进行对比分析,得到的实验结论是:不同物质其质量与体积的比值是不同的.
③铁的密度为7.9×103kg/m3.