题目内容
【题目】阅读短文,回答问题.
水下机器人
2018年12月14日,南方电网首个作业级水下机器人下水为海底电缆“护驾”。水下机器人的引进对海南海底电缆进行埋深检测、视频摄像、悬空裸露检测等发挥重要作用。如图甲,某水下机器人“小H”由锂电池供电,采用电动机提供动力,下表是“小H”的部分技术参数,能量密度是指电池单位质量所输出的电能。

参数名称 | 电源电压 | 最大承受压强 | 提升重物最大高度 | 锂电池能量密度 | 锂电池的总质量 |
数据 | 60V |
| 0.8m | 0.50(kW·h)/kg | 2kg |
(1)当“小H”在海水里下潜过程中,下列说法中错误的是_____;
A.以海底礁石为参照物,“小H”是运动的
B.“小H”摄像时,成倒立、缩小的虚像
C.“小H”所受到海水的压强增大
D.“小H”中的电动机工作原理是磁场对电流的作用
(2)“小H”的外壳应选用耐腐蚀、硬度_____(选填 “大”或“小”)的材料制成。深海中的“小H”利用声呐装置与海面联系,声呐是利用______波传递信息的;
(3)某次“小H”在海底作业时,需将体积![]() 、质量60kg的电子设备提高0.6m,消耗了锂电池总储存能量的0.01%,则“小H”对电子设备做功为___J,“小H”中电动机的能量转化效率至少为___%;(取海水的密度为
、质量60kg的电子设备提高0.6m,消耗了锂电池总储存能量的0.01%,则“小H”对电子设备做功为___J,“小H”中电动机的能量转化效率至少为___%;(取海水的密度为![]() , g=10N/kg)
, g=10N/kg)
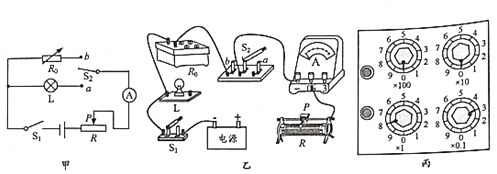
(4)如图乙为“小H”承受压强的过载保护电路原理图,电源电压为12V, RL是压敏电阻,其电阻值随受到的压强变化关系如下表所示,图乙触发器的电阻忽略不计,电流表的示数超过0.2A时就触发电动机停止工作,放弃下潜指令,以免“小H”受损伤;

压强p/ | 0 | 1.0 | 2.0 | 3.0 | 4.0 | 5.0 | 6.0 |
压敏电阻RL/Ω | 55 | 45 | 32 | 25 | 20 | 17 | 15 |
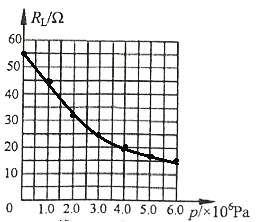
①根据表中的数据,请在图丙坐标系中画出压敏电阻RL与压强p之间的关系图线___;

②为保护“小H”,电阻箱R0的阻值至少应为___Ω;“小H”长时间在海底工作后,为减轻其最大承受压强,应将电阻箱R0的阻值适当___________(选填“增大”或“减小”)。
【答案】D 大 超声波 306J 85% 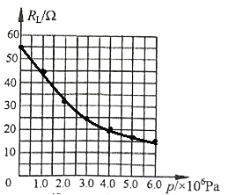 40Ω 减小
40Ω 减小
【解析】
(1)[1]以海底礁石为参照物,“小H”的位置发生了变化,是运动的,故A正确;
“小H”摄像时,摄像头相当于一个照相机,成的是倒立、缩小的实像,故B错误;
“小H”在海水里下潜过程中,深度变大,根据p=ρgh可知“小H”所受到海水的压强增大,故C正确;
“小H”中的电动机工作原理是磁场对电流的作用,故D正确。
故选B。
(2)[2]海水具有腐蚀性,且随着深度增加,受到海水的压力也越来越大,所以“小H”的外壳应选用耐腐蚀、硬度大的材料制成。
[3]声呐是利用超声波传递信息的。
(3)[4]电子设备受到浮力
![]()
电子设备的重力
![]()
“小H”对电子设备做的功
![]()
[5]锂电池总储存能量
![]()
消耗的锂电池储存能量
![]()
“小H”中电动机的能量转化效率
![]()
(4)[6]根据表中的数据利用描点法在坐标图中一一描出来,用一条光滑的曲线将这些点连接起来,如图所示
[7]电源电压为12V,电流表的示数最大0.2A,则由![]() 可得电路最大总电阻为
可得电路最大总电阻为
![]()
由第一个表中数据知道最大承受压强为![]() ,对照第二个表可知压敏电阻为20Ω;则电阻箱R0的阻值至少应为
,对照第二个表可知压敏电阻为20Ω;则电阻箱R0的阻值至少应为
![]()
[8]由于电源电压和触发电动机停止工作的电流不变,根据![]() 可知电路总电阻不变,为减轻其最大承受压强,则压敏电阻的阻值将增大,所以应将电阻箱R0的阻值适当减小。
可知电路总电阻不变,为减轻其最大承受压强,则压敏电阻的阻值将增大,所以应将电阻箱R0的阻值适当减小。

 阶梯计算系列答案
阶梯计算系列答案