题目内容
5.下面是小枫和小红同学在实验室探究“杠杆的平衡条件”的实验(实验中使用的每个钩码重0.5N):
(1)实验前,将杠杆的中点置于支架上,发现杠杆在如图甲所示的位置,此时杠杆是(选填“是”或“否”)处于平衡状态.小枫将左端的平衡螺母向右调,小红认为也可以将右端的平衡螺母向右调(选填“右”或“左”),使杠杆在水平位置平衡.
(2)如图乙所示,若在B点处施加一个竖直向下的拉力F=3N时,杠杆仍在水平位置平衡.当拉力F向右倾斜时,仍要保持杠杆水平平衡,拉力F的大小将变大(选填“变大”、“变小”或“不变”).
(3)在探究过程中,在杠杆左端某一固定位置挂总重G=2.5N的钩码,在杠杆右端不同位置处施加不同的竖直向下的力F,保证杠杆处于水平位置平衡状态.根据多次测量的力和力臂F、L数据,画出F和$\frac{1}{L}$的图线如图丙,由图丙可得出杠杆平衡条件是:F与L成反比.根据杠杆平衡条件,可求出其重力G的力臂是0.2m.
(4)在探究过程中,如图丁,在杠杆的右端挂重物G,在力臂为L的力F的作用下静止在图丁所示位置,请在图中做出力F的示意图.
分析 (1)杠杆处于静止状态或匀速转动状态时,杠杆处于平衡状态;调节杠杆在水平位置平衡,平衡螺母向上翘的一端移动.
(2)根据钩码个数与每个钩码的重力求出测力计拉力;当拉力F向右倾斜时,分析出力臂的变化结合杠杆的平衡条件判断力的变化.
(3)从图中观察是一条直线,所以是正比例函数图象,并要注意横坐标是力臂的倒数,所以力与力臂成反比.在计算重力G的力臂时要根据杠杆的平衡条件动力×动力臂=阻力×阻力臂,根据图表确定力F和力臂L,代入数据并可得出.
(4)根据力的作用线与力臂垂直的关系进行分析,先确定力的作用点,然后根据作用线的方向和为了使杠杆平衡确定力的方向.
解答 解:(1)杠杆静止在如图甲所示位置,杠杆处于静止状态,所以此时杠杆处于平衡状态;如图甲,杠杆的右端上翘,要使杠杆在水平位置平衡,平衡螺母向上翘的右端移动;
(2)设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:FALA=FBLB,即4G×3L=FB×2L,解得FB=6G,需挂6个钩码.
若在B点处施加一个竖直向下的拉力,则FB=6G=6×0.5N=3N;
若拉力F向右倾斜时,此时F的力臂变短,根据杠杆的平衡条件,力变大.
(3)由图知,拉力F与其力臂的倒数$\frac{1}{L}$成正比,F与L成反比.当力F=2N时,其力臂的倒数为4m-1,所以力臂为$\frac{1}{4}$m,
根据杠杆的平衡条件,G•LG=F•LF,
代入数据:2.5N×LG=2N×$\frac{1}{4}$m,
解得LG=0.2m.
(4)作垂直于力臂L的作用线,并且与杠杆的交点为动力作用点,然后过作用点作斜向下的力F.如图所示: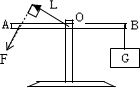
故答案为:(1)是;右;(2)3;变大;(3)反;0.2;(4)见上图.
点评 杠杆处于静止状态和匀速转动状态,杠杆都是平衡的.在探究杠杆平衡条件时,使杠杆在水平位置平衡,是为了便于在杠杆上读出动力臂和阻力臂.杠杆平衡条件是杠杆平衡计算的基础内容,一定要掌握.同时,还要学会杠杆力臂的画法等.

 阅读快车系列答案
阅读快车系列答案| A. | 用压力锅煮熟食物 | B. | 用注射器吸取药液 | ||
| C. | 用塑料吸管吸饮料 | D. | 用塑料吸盘“吸住”瓷砖 |

猜想A:与小球的质量大小有关;
猜想B:与小球运动的快慢有关;
猜想C:与绳子的长度有关.
为了验证猜想,学习小组于是进行实验探究:用一根细绳子的一端拴住一个小球,用手抓住绳子的另一端,抡动细绳,让小球在光滑水平面上做圆周运动,如图2所示.实验中,用手感受绳子的拉力大小.做几次实验后,得到实验数据如表:
| 实验 次数 | 小球质量(g) | 运动的 快慢 | 绳子的长度(cm) | 绳子的 拉力 |
| 1 | 15 | 慢 | 10 | 很小 |
| 2 | 20 | 慢 | 10 | 小 |
| 3 | 20 | 快 | 10 | 大 |
| 4 | 20 | 快 | 15 | 很大 |
(2)实验中,小球的运动方向是变化的,说明其运动状态一定(选填“一定”或“不一定”)改变.若绳子断了,小球继续运动,那是因为小球具有惯性.
(3)分析对比实验次数1、2的数据,可以初步验证猜想A;分析对比实验次数2、3的数据,可以初步验证猜想B.
(4)本实验采用的研究方法有转换法和控制变量法.
 小明和小红一起做“探究杠杆平衡条件”的实验:
小明和小红一起做“探究杠杆平衡条件”的实验:(1)实验前,将杠杆的中点置于支架上,调节两端的平衡螺母,使杠杆在水平位置平衡,其目的是便于测量力臂.
(2)在杠杆的两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,并测出力臂,多次实验并把数据记录在表格中.
| 次数 | F1/N | l1/cm | F2/N | l2/cm |
| 1 | 1 | 10 | 2 | 5 |
| 2 | 2 | 10 | 1 | 20 |
| 3 | 2 | 15 | 3 | 10 |
(4)多次实验的目的是使结论具有普遍性;
(5)小红在A点悬挂两个钩码,要使杠杆在水平位置平衡,需在B点悬挂3个钩码;取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上拉,使杠杆在水平位置平衡,测力计的拉力为0.75N(每个钩码重0.5N);若改变弹簧测力计拉力的方向,使之向右上方,杠杆仍然水平位置平衡,则测力计的读数将变大(选填“变大”、“变小”、“不变”).
(6)下列正在使用中的杠杆;①用镊子取砝码;②用扳手宁螺母;③用钉锤拔钉子,属于费力的杠杆是①(填序号)
 如图所示的测量电路中,闭合开关后电压表V1的示数为2.5V,V2的示数为3.5V,则V的示数应为( )
如图所示的测量电路中,闭合开关后电压表V1的示数为2.5V,V2的示数为3.5V,则V的示数应为( )| A. | 6V | B. | 1V | C. | 3V | D. | 3.5V |
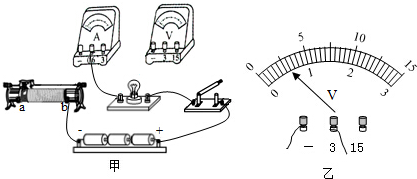
 小明和小强在探究“电流与电压和电阻的关系”实验
小明和小强在探究“电流与电压和电阻的关系”实验(1)小明探究“电流与电压的关系”,该实验中滑动变阻器的作用除了保护电路外,其作用主要是改变电阻两端的电压
(2)实验中,所测的数据如表一所示,由表一数据可得:在电阻一定时,导体中的电流与导体两端的电压成正比.
表一:
| R=10Ω | 电压U/V | 1.5 | 2 | 2.5 |
| 电流I/A | 0.15 | 0.2 | 0.25 |
| U=2V | 电阻R/Ω | 5 | 10 | 20 |
| 电流I/A | 0.4 | 0.2 | 0.1 |
①请依据以上表格和电路图分析,将AB间电阻由5Ω换成10Ω,闭合开关S进行实验时,应向右(选填“左”或“右”)移动滑动变阻器滑片P,使电压表的示数保持2V不变;
②由表二数据可得:在电压一定时,导体中的电流与导体的电阻成反比.
 如图所示的玻璃容器,底面积为40厘米2,内装有密度是0.8×103千克/米3的酒精500cm3,酒精的深度为10厘米,(g=10N/kg)求:
如图所示的玻璃容器,底面积为40厘米2,内装有密度是0.8×103千克/米3的酒精500cm3,酒精的深度为10厘米,(g=10N/kg)求: 悬浮在海水中的潜艇排开水的体积为3×103m3,海水的密度为1.0×103kg/m3.
悬浮在海水中的潜艇排开水的体积为3×103m3,海水的密度为1.0×103kg/m3.