题目内容
14.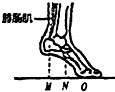 在人体中有许许多多杠杆,甚至踮一下脚尖都是人体杠杆在起作用.如图所示.人以O(填字母)为支点;通过小腿腓肠肌用力,踮起脚尖,按杠杆的分类,这是一个省力杠杆(填“省力”或“费力”).如果一位中学生的体重500N,踮起脚时,假设重力的作用线正好通过杠杆的中心,则踮起时每只脚的腓肠肌所产生的力为125N.
在人体中有许许多多杠杆,甚至踮一下脚尖都是人体杠杆在起作用.如图所示.人以O(填字母)为支点;通过小腿腓肠肌用力,踮起脚尖,按杠杆的分类,这是一个省力杠杆(填“省力”或“费力”).如果一位中学生的体重500N,踮起脚时,假设重力的作用线正好通过杠杆的中心,则踮起时每只脚的腓肠肌所产生的力为125N.
分析 (1)根据动力臂与阻力臂的大小关系来判断杠杆的类型.
(2)利用杠杆的平衡条件:动力×动力臂=阻力×阻力臂,求解动力的大小.
解答 解:踮一下脚尖,脚绕O点转动,所以O为支点.
踮脚尖时,动力臂大于阻力臂,所以这是一个省力杠杆.
如图所示,动力臂为OM,阻力臂为ON,
由杠杆的平衡条件:动力×动力臂=阻力×阻力臂,可得:
动力=阻力×$\frac{隍力臂}{动力臂}$,
即F=G×$\frac{ON}{OM}$=$\frac{1}{2}$G=$\frac{1}{2}$×500N=250N.
人有两只脚,故每只脚用力$\frac{1}{2}$×250N=125N.
故答案为:O;省力;125N.
点评 人体中包含很多杠杆,比如前臂托起物体、俯卧撑、掂脚尖等等,平时注意利用杠杆的知识来分析,学以致用.

练习册系列答案
相关题目

 我国将于2015年9月举行抗战胜利大阅兵活动.早在2009年4月23日,为纪念中国人民解放军海军成立60周年而举行的海上阅兵在青岛附近黄海海域举行.如图所示为接受检阅的中国海军核潜艇.此时,潜艇受的浮力等于(选填“大于”、“小于”或“等于”)潜艇的重力;当潜艇要潜入海面下时,它采取的措施是增大(填“增大”或“减小”)自身的重力.
我国将于2015年9月举行抗战胜利大阅兵活动.早在2009年4月23日,为纪念中国人民解放军海军成立60周年而举行的海上阅兵在青岛附近黄海海域举行.如图所示为接受检阅的中国海军核潜艇.此时,潜艇受的浮力等于(选填“大于”、“小于”或“等于”)潜艇的重力;当潜艇要潜入海面下时,它采取的措施是增大(填“增大”或“减小”)自身的重力.
19.在探究“斜面机械效率”实验中,数据记录如表,分析实验数据:
(1)你认为斜面省力情况与斜面倾斜程度的关系是:斜面越陡,越费力.
(2)你对斜面机械效率的问题可获得的初步结论是:当斜面长和斜面粗糙程度一定时,斜面的倾斜程度越陡,斜面的机械效率越高.
(3)你认为在完成本实验过程中,主要的困难是拉着物体做匀速直线运动;由以上的数据,小慧还发现木块受到木块的摩擦力与斜面的倾斜程度有关,你认为两者的关系是:斜面越陡,摩擦力越小
(4)若要验证斜面的机械效率跟物体的重力的关系,应控制斜面的长、斜面的倾斜程度和斜面粗糙程度不改变,这时应用的物理科学方法是控制变量法.
| 实验 次数 | 斜面的 倾斜程度 | 木块的重力 G/N | 斜面高度 h/m | 沿斜面拉力 F/N | 斜面长 s/m | 机械效率 η |
| 1 | 较缓 | 5 | 0.15 | 2 | 0.5 | 75% |
| 2 | 较陡 | 5 | 0.20 | 2.5 | 0.5 | 80% |
| 3 | 最陡 | 5 | 0.25 | 3 | 0.5 | 83% |
(2)你对斜面机械效率的问题可获得的初步结论是:当斜面长和斜面粗糙程度一定时,斜面的倾斜程度越陡,斜面的机械效率越高.
(3)你认为在完成本实验过程中,主要的困难是拉着物体做匀速直线运动;由以上的数据,小慧还发现木块受到木块的摩擦力与斜面的倾斜程度有关,你认为两者的关系是:斜面越陡,摩擦力越小
(4)若要验证斜面的机械效率跟物体的重力的关系,应控制斜面的长、斜面的倾斜程度和斜面粗糙程度不改变,这时应用的物理科学方法是控制变量法.
6.在做“研究杠杆的平衡条件”的实验时:某同学测得在杠杆平衡时的三组数据,请将所缺的一项填在表中:
另一同学实验操作时按时按如下步骤进行:
A、将杠杆放在中点支架上.
B、记下两边钩码的重力,并用直尺量出它们的力臂,分别填入实验数据记录表中.
C、改变力和力臂的数值,做三次实验.
D、把钩码挂在杠杆两边,且改变钩码的位置,使杠杆平衡.
E、求出各次实验的动力乘以动力臂及阻力乘以阻力臂的值.
试回答下列问题:
(1)该同学实验操作的正确顺序是ADBCE.
(2)该同学在第A步操作后,漏掉一个重要步骤,其内容是调节杠杆在水平位置保持平衡,这样做的目的是便于测量力臂.
(3)当正确完成了此实验后,可以得出的结论是:F1L1=F2L2.
| 实验次数 | 动力F1(N) | 动力臂L1(cm) | 阻力F2(N) | 阻力臂力L2(cm) |
| 1 | 0.98 | 15 | 0.49 | 30 |
| 2 | 1.17 | 10 | 0.39 | 30 |
| 3 | 1.47 | 0.294 | 25 |
A、将杠杆放在中点支架上.
B、记下两边钩码的重力,并用直尺量出它们的力臂,分别填入实验数据记录表中.
C、改变力和力臂的数值,做三次实验.
D、把钩码挂在杠杆两边,且改变钩码的位置,使杠杆平衡.
E、求出各次实验的动力乘以动力臂及阻力乘以阻力臂的值.
试回答下列问题:
(1)该同学实验操作的正确顺序是ADBCE.
(2)该同学在第A步操作后,漏掉一个重要步骤,其内容是调节杠杆在水平位置保持平衡,这样做的目的是便于测量力臂.
(3)当正确完成了此实验后,可以得出的结论是:F1L1=F2L2.

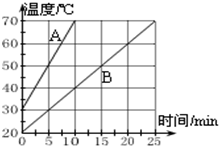 用两个完全相同的电加热器,分别给质量相同的A、B两种液体加热,它们的温度随时间变化的图象如图所示.根据图象可知:加热相同的时间,液体A的温度升高比较快(填“A”或“B”);两者相比,液体B的比热容比较大.(填“大”或“小”)
用两个完全相同的电加热器,分别给质量相同的A、B两种液体加热,它们的温度随时间变化的图象如图所示.根据图象可知:加热相同的时间,液体A的温度升高比较快(填“A”或“B”);两者相比,液体B的比热容比较大.(填“大”或“小”)