题目内容
8.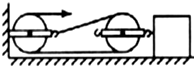 用如图所示的滑轮组拉重200N的物体,使其在20s内匀速移动了4m,若地面对物体的摩擦力为60N,所用的拉力为35N,则此过程中( )
用如图所示的滑轮组拉重200N的物体,使其在20s内匀速移动了4m,若地面对物体的摩擦力为60N,所用的拉力为35N,则此过程中( )| A. | 绳子自由端移动的速度为0.4m/s | B. | 拉力的功率为14W | ||
| C. | 克服物体的摩擦力做的功为240J | D. | 滑轮组的机械效率为80% |
分析 (1)知道物体在水平地面上移动距离,根据滑轮组的结构,求出绳子末端(拉力F)移动的距离,利用v=$\frac{s}{t}$即可求出速度;
(2)利用功的公式和功率的公式求拉力的功率;
(3)根据知道摩擦力的大小和物体移动的距离,利用W有用=Fs求有用功;
(4)求出了有用功,再求出总功,利用机械效率的公式求该装置的机械效率.
解答 解:A、由图可知,拉力移动的距离s′和物体移动的距离s的关系:
s′=2s=2×4m=8m,则v′=$\frac{s′}{t}$=$\frac{8m}{20s}$=0.4m/s,故A正确;
B、拉力所做的总功W总=Fs′=35N×8m=280J,
的拉力F的功率:
P=$\frac{{W}_{总}}{t}$=$\frac{280J}{20s}$=14W,故B正确;
C、W有用=fs=60N×4m=240J,故C正确;
D、装置的机械效率:
η=$\frac{{W}_{有用}}{{W}_{总}}$×100%=$\frac{240J}{280J}$×100%≈85.7%,故D错误.
故选ABC.
点评 本题综合考查了功的计算、功率的计算、机械效率的计算,本题关键:知道克服摩擦力做的功为有用功.

练习册系列答案
相关题目
18.小雯设计了一个测量物体重力的“托盘秤”,如图甲是原理示意图,其中的托盘用来放置被测物体,OBA是可绕O点转动的杠杆,R1是压力传感器(其电阻值会随所受压力大小变化而变化,变化关系如下表),R0为定值电阻,V表为显示重力大小的仪表(实质是一个量程为0~3V的电压表).已知OB:OA=l:2,R0=100Ω,电源电压恒为3V(忽略托盘、杠杆及压杆的重力).
(1)托盘上没放物体时,压力传感器R1的电阻值是300Ω.
(2)当托盘上的压力增大时,压力表的示数增大(填“减小”、“增大”或“不变”).
(3)当托盘上放被测物体时,电压表的示数如图乙所示,则此时压力传感器R1上的电压是多少?被测物体的重力是多少?

| 压力F/N | 0 | 50 | 100 | 150 | 200 | 250 | 300 |
| 电阻R1/Ω | 300 | 250 | 200 | 150 | 100 | 50 | 0 |
(2)当托盘上的压力增大时,压力表的示数增大(填“减小”、“增大”或“不变”).
(3)当托盘上放被测物体时,电压表的示数如图乙所示,则此时压力传感器R1上的电压是多少?被测物体的重力是多少?
19.一伞兵(含伞)跳伞后竖直降落,其速度v与时间t的关系如图所示.以下说法中正确的是( )
| A. | 在0〜t1内,伞兵受到的重力大于阻力 | |
| B. | 在t1~t2内,伞兵受到的重力小于阻力 | |
| C. | 在t2~t3内,伞兵受到的重力等于阻力 | |
| D. | 在t2~t3内,伞兵静止不动 |
13. 如图所示,不计绳重与摩擦,物体G在竖直向上的拉力F的作用下,10s内上升2m.已知G=180N,F=100N.这一过程中,不能得到的结论是( )
如图所示,不计绳重与摩擦,物体G在竖直向上的拉力F的作用下,10s内上升2m.已知G=180N,F=100N.这一过程中,不能得到的结论是( )
如图所示,不计绳重与摩擦,物体G在竖直向上的拉力F的作用下,10s内上升2m.已知G=180N,F=100N.这一过程中,不能得到的结论是( )| A. | 绳子的自由端上升4m | B. | 拉力F的功率为20W | ||
| C. | 动滑轮重20N | D. | 该动滑轮的机械效率为90% |
20.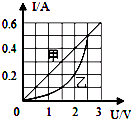 在探究“导体中的电流与电压关系”的实验中,得到了甲、乙两个元件电流与电压的数据,通过整理绘制出了如图所示图象,据图象分析,下列判断正确的是( )
在探究“导体中的电流与电压关系”的实验中,得到了甲、乙两个元件电流与电压的数据,通过整理绘制出了如图所示图象,据图象分析,下列判断正确的是( )
在探究“导体中的电流与电压关系”的实验中,得到了甲、乙两个元件电流与电压的数据,通过整理绘制出了如图所示图象,据图象分析,下列判断正确的是( )| A. | 若通过乙的电流增大1倍,则乙的功率将变为原来的4倍 | |
| B. | 将甲接到6V的电路中,2s内消耗的电能为7.2J | |
| C. | 若将甲、乙两元件串联起来接到电路中,当通过甲元件的电流为0.2A时,甲、乙两元件消耗的功率之比为2﹕1 | |
| D. | 若甲、乙元件并联后,接到2V的电压下,电路消耗的总功率是1.2W |
17.物理研究中常常用到“控制变量法”、“等效替代法”、“理想化模型”、“类比法”等科学方法.在下列研究实例中,运用了“控制变量法”的是( )
| A. | 研究电流时,从分析水流的形成来分析电流的形成 | |
| B. | 分析电流的大小时,根据电流产生效应的大小来判断电流大小 | |
| C. | 研究电阻与导体长度的关系时,保持导体的材料、横截面积和温度不变 | |
| D. | 研究光的现象时,用光线表示光的传播路径和方向 |
