题目内容
17.如图所示,在“探究杆的平衡条件”的实验中:
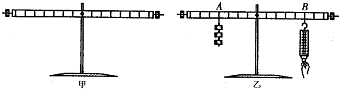
(1)在没有挂钩码时杠杆的位置如图a所示,为使杠杆在水平位置平衡,应将杠杆左端螺母向右(填“左”或“右”)旋一些.调好后,施加的动力和阻力的方向都是竖直方向,这样做的好处是方便确定力臂.
(2)某小组在实验完成后,进行了如图b、c的探究,发现杠杆两边有两个动力F1、F2和两个阻力F3、F4(对应的力臂分别为L1、L2、L3、L4)时仍可以平,请你用字母归纳两个动力和两个阻力平衡的条件:F1L1+F2L2=F3L3+F4L4.
(3)用你的结论,在图d中杠杆右侧画出用一个动力使杠杆平衡的示意图.
分析 (1)杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂(重力的方向跟杠杆垂直),同时能够消除杠杆自身重力对杠杆平衡的影响,因此在此实验中我们应首先调节杠杆在水平位置平衡;
(2)无论两侧挂几组钩码,每一组都有自己的力与力臂,因此,求出每一个力与相应力臂的乘积,再相加,就是整个这一侧的结果,同样表示出另一侧,二者依然是平衡的;
(3)根据杠杆的平衡条件,确定在杠杆右侧用一个动力使杠杆平衡的力的位置和大小.
解答 解:
(1)杠杆不在水平位置平衡,左端向下倾斜,则重心应向右移动,故应将右端的平衡螺母向右调节;实验前使杠杆在水平位置平衡,其目的是杠杆的重心恰好通过支点,消除杠杆自身重力对杠杆平衡的影响,同时便于直接从杠杆上读出力臂;
(2)同样根据杠杆的整体平衡,分别表示出每一个力与力臂的乘积,最终可猜想F1L1+F2L2=F3L3+F4L4.
(3)设一个钩码的重力为G,杠杆一个格的长度为L,根据杠杆平衡条件可知,杠杆左侧F1L1+F2L2=G×4L+2G×L=6GL;所以可以在杠杆右侧第6格处挂一个钩码,如下图:
故答案为:(1)右:方便确定力臂;(2)F1L1+F2L2=F3L3+F4L4;(3)见上图.
点评 (1)杠杆平衡条件应用比较广泛,利用杠杆平衡条件可以判断杠杆是否平衡、力臂大小、力的大小等.
(2)探究杠杆平衡条件的实验中,杠杆的两端各挂一组钩码,实验操作比较简单,计算也比较简单;如果杠杆的两端挂多组钩码,实验操作复杂,计算也比较复杂.但是两种情况都能得出正确的结论.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
15.“神舟四号”飞船载有模拟宇航员系统,进行拟人载荷试验,其中的形体假人具有质量、形状、密度与真人基本一致的特点,你认为下列数据中最接近形体假人体积的是( )
| A. | 10分米3 | B. | 50分米3 | C. | 120分米3 | D. | 150分米3 |

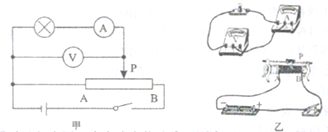
5.小红的实验小组用如图甲所示的实验装置探究杠杆的平衡条件.
(1)在调节杠杆的平衡时,如果杠杆右侧高左侧低,应将两端的平衡螺母向右调节,使其在水平位置平衡.使杠杆在水平位置平衡的好处是便于直接读出力臂;
(2)将下列实验表格补充完整:①处应填:动力×动力臂/(N•m),②处应填:阻力×阻力臂/(N•m);
(3)如图乙所示,杠杆上的每小格长为2cm,在支点左侧的A点挂3个重均为0.5N的钩码,在支点右侧的B点,用弹簧测力计拉杠杆,使其在水平位置平衡.这时弹簧测力计的示数应为1.2N.如果保持B点不动,弹簧测力计的方向向右倾斜,使杠杆仍在水平位置平衡,则弹簧测力计的示数将变大.
(1)在调节杠杆的平衡时,如果杠杆右侧高左侧低,应将两端的平衡螺母向右调节,使其在水平位置平衡.使杠杆在水平位置平衡的好处是便于直接读出力臂;
(2)将下列实验表格补充完整:①处应填:动力×动力臂/(N•m),②处应填:阻力×阻力臂/(N•m);
| 实验 次数 | 动力/N | 动力臂 /m | 阻力/N | 阻力臂 /m | ① | ② |
| 1 | ||||||
| 2 | ||||||
| 3 |
 小华同学做“测小灯泡电功率”实验,所用器材:电源、小灯(标有“2.2V”字样且额定功率小于1瓦)、滑动变阻器(“20Ω 1A”或“10Ω 2A”)、电压表、电键及若干导线,所有器材均完好.
小华同学做“测小灯泡电功率”实验,所用器材:电源、小灯(标有“2.2V”字样且额定功率小于1瓦)、滑动变阻器(“20Ω 1A”或“10Ω 2A”)、电压表、电键及若干导线,所有器材均完好.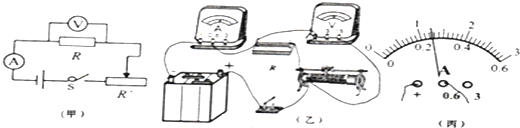
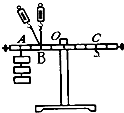 在“研究杠杆平衡条件”实验中,先调节杠杆在水平位置平衡.如图所示,在A处挂三个钩码,要使杠杆平衡,应在C处挂4个钩码(每个钩码重均1N);撤去C处钩码,改在B处用弹簧测力计竖直向上拉,杠杆平衡时弹簧测力计上的示数为6N,若将B处的弹簧测力计改为斜向上拉,杠杆平衡时弹簧测力计的示数将变大(变大/不变/变小).
在“研究杠杆平衡条件”实验中,先调节杠杆在水平位置平衡.如图所示,在A处挂三个钩码,要使杠杆平衡,应在C处挂4个钩码(每个钩码重均1N);撤去C处钩码,改在B处用弹簧测力计竖直向上拉,杠杆平衡时弹簧测力计上的示数为6N,若将B处的弹簧测力计改为斜向上拉,杠杆平衡时弹簧测力计的示数将变大(变大/不变/变小).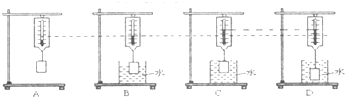
 电源电压为3V,为了探究小灯泡在(0V~3V)不同电压下的电阻情况,某同学设计如图甲电路,当滑动变阻器滑片P从A端向B端滑动过程中,可探究小灯泡的灯丝电阻在不同电压条件下的阻值情况.
电源电压为3V,为了探究小灯泡在(0V~3V)不同电压下的电阻情况,某同学设计如图甲电路,当滑动变阻器滑片P从A端向B端滑动过程中,可探究小灯泡的灯丝电阻在不同电压条件下的阻值情况.