题目内容
17. 如图是某款扫地机器人及铭牌上的部分参数,请回答下列有关问题.
如图是某款扫地机器人及铭牌上的部分参数,请回答下列有关问题.| 项目 | 指标参数 |
| 工作电压 | 15V |
| 功率 | 30W |
| 电池容量 | 2000mAh |
(2)机器人的供电系统设有自动充电功能,当检测到电池容量低至10%时会自动返回充电.若返回过程中受到的阻力为20N,为确保机器人能顺利返回充电,需要充电时离充电座最远为216米.(剩余电池容量的40%用于提供克服阻力做功)
分析 (1)流体压强与流速的关系:流速越大,压强越小.
(2)先利用W=UIt求出电池的能量,然后由题机器人返回消耗电能W返=40%W剩,返回克服阻力做功W=Fs=fs,由此计算需要充电时离充电座最远距离.
解答 (1)机器人吸尘的工作原理是流体流速大的地方压强小,即通过电机转动时内部压强小于外部压强,从而使杂物进入吸尘器;
(2)电池的容量为W=UIt=15V×2A×3600s=108000J,
电池容量低至10%时会自动返回充电,所以克服摩擦力做功为:
W返=40%W剩=40%×10%×108000J=4320J,
因为W=Fs=fs,
所以为确保机器人能顺利返回充电,需要充电时离充电座最远为:
s=$\frac{{W}_{返}}{f}$=$\frac{4320J}{20N}$=216m.
故答案为:小于;216.
点评 本题考查了流体压强和流速的关系,电能、功的计算,要熟练掌握物理公式,并灵活的运用,正确理解题意,并且能从表格中获取有用信息.

练习册系列答案
 学而优衔接教材南京大学出版社系列答案
学而优衔接教材南京大学出版社系列答案 小学课堂作业系列答案
小学课堂作业系列答案
相关题目
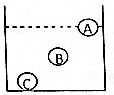 有三个体积都相等的物体浸在水中(如图),则物体A受到的浮力等于受到的重力;物体B受到的浮力等于它自身的重力:物体C受到的浮力小于它自身的重力;物体B受到的重力等于物体C受到的浮力(填“大于”、“小于”、“等于”).
有三个体积都相等的物体浸在水中(如图),则物体A受到的浮力等于受到的重力;物体B受到的浮力等于它自身的重力:物体C受到的浮力小于它自身的重力;物体B受到的重力等于物体C受到的浮力(填“大于”、“小于”、“等于”).

 小芳同学探究通电螺线管外部磁场的实验报告如下:
小芳同学探究通电螺线管外部磁场的实验报告如下:
9. 如图甲所示是小明的调光灯电路图,他将粗细均勻的电阻丝AB通过滑片P连入电路,小灯泡的额定电压为6V.闭合开关S后,滑片P从最左端A滑到最右端B的过程中,小灯泡的I-U关系图象如图乙所示.(电阻丝AB的阻值不随温度变化),下面说法中正确的是( )
如图甲所示是小明的调光灯电路图,他将粗细均勻的电阻丝AB通过滑片P连入电路,小灯泡的额定电压为6V.闭合开关S后,滑片P从最左端A滑到最右端B的过程中,小灯泡的I-U关系图象如图乙所示.(电阻丝AB的阻值不随温度变化),下面说法中正确的是( )
如图甲所示是小明的调光灯电路图,他将粗细均勻的电阻丝AB通过滑片P连入电路,小灯泡的额定电压为6V.闭合开关S后,滑片P从最左端A滑到最右端B的过程中,小灯泡的I-U关系图象如图乙所示.(电阻丝AB的阻值不随温度变化),下面说法中正确的是( )| A. | 滑片P从最左端A滑到最右端B的过程中,电路中的电流变大 | |
| B. | 电阻丝AB的阻值为9Ω | |
| C. | 小灯泡的最小功率为2.25W | |
| D. | 电路工作1min至少消耗360J的电能 |
7.小慧同学轮流将A、B、C三个不同的电阻接入图甲电路中R所示的位置,通过多次移动滑片的位置,分别记录了每个电阻接入电路时电流表和电压表的示数,并绘制了它们各自的函数图象,如图乙所示.下列说法中正确的是( )

| A. | 若要利用该电路探究电流与电压的关系,不能使用电阻B进行实验 | |
| B. | 利用电阻A做实验时,若滑动变阻器的滑片向右滑动,电压表的示数会变大 | |
| C. | 由图乙可知,B的电阻在不断改变,说明导体的电阻大小与电压大小有关 | |
| D. | 由乙图可知A的阻值比C大 |