题目内容
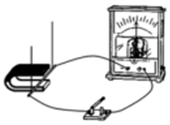
10.如图甲所示的电路,小灯泡L标有“6V 3W”字样,小灯泡的I-U关系如图乙所示,R为10Ω的定值电阻,当小灯泡电功率为0.8W时,小灯泡的电阻是5Ω,电流表的示数为0.6A.
分析 由电路图可知,电阻R与灯泡L并联,电压表测电源的电压,电流表测干路电流,由图象读出小灯泡电功率为0.8W时的电压和电流,根据欧姆定律求出灯泡的电阻,根据并联电路的电压特点和欧姆定律求出通过R的电流,根据并联电路的电流特点求出干路电流.
解答 解:由电路图可知,电阻R与灯泡L并联,电压表测电源的电压,电流表测干路电流,
由图乙可知,当UL=2V,通过的电流IL=0.4A时,灯泡的电功率:
PL=ULIL=2V×0.4A=0.8W,
由I=$\frac{U}{R}$可得,小灯泡的电阻值:
RL=$\frac{{U}_{L}}{{I}_{L}}$=$\frac{2V}{0.4A}$=5Ω,
因并联电路中各支路两端的电压相等,
所以,通过R的电流:
IR=$\frac{{U}_{R}}{{I}_{R}}$=$\frac{{U}_{L}}{R}$=$\frac{2V}{10Ω}$=0.2A,
因并联电路中干路电流等于各支路电流之和,
所以,干路电流表的示数:
I=IL+IR=0.4Ω+0.2A=0.6A.
故答案为:5;0.6.
点评 本题考查了并联电路的特点和欧姆定律、电功率公式的应用,从图象中读出灯泡的功率为0.8W时的电流和电压是关键.

练习册系列答案
 科学实验活动册系列答案
科学实验活动册系列答案
相关题目
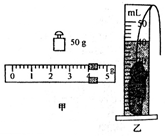
 用托盘天平和量筒测量矿石的密度:天平要放在水平桌面上,调节好天平,测出矿石的质量,天平再次平衡时,所加砝码和游码的位置如图所示,矿石的质量为52g,用量筒测得矿石的体积为20cm3,则矿石的密度为2.6×103kg/m3.
用托盘天平和量筒测量矿石的密度:天平要放在水平桌面上,调节好天平,测出矿石的质量,天平再次平衡时,所加砝码和游码的位置如图所示,矿石的质量为52g,用量筒测得矿石的体积为20cm3,则矿石的密度为2.6×103kg/m3.
1.某智能扫地机器人(如图甲)可通过灰尘传感器自动寻找灰尘清扫,通过电动机旋转、产生高速气流将灰尘等吸入集尘盒.图乙为其部分工作原理图,控制电路电源电压U为4.5V,定值电阻R0=12Ω,R为光敏电阻,其阻值随光照强度E(单位cd)的变化如图丙所示.下表为其部分工作参数(注:电池容量指工作电流与工作总时间的乘积)

(1)当地面灰尘增多,使空气的透光程度减弱,使照射到光敏电阻上的光照强度减弱,B触头与静触头A(填“A”或“C”)接触,则电动机工作;反之,指示灯亮,从而达到自动控制的目的.
(2)当剩余电量减为电池总容量的20%时,机器人会主动寻找充电器充电.在充满电后到主动寻找充电器期间的电池总容量,能持续供应该机器人正常工作多少小时?
(3)若电压表示数小于等于3V时,电动机开始工作.求电压表示数为3V时,光照强度为多少?
| 额定工作电压 | 12伏 | 额定功率 | 30瓦 |
| 电池总容量 | 2.5Ah(安时) | 工作噪音 | <50dB(分贝) |
(2)当剩余电量减为电池总容量的20%时,机器人会主动寻找充电器充电.在充满电后到主动寻找充电器期间的电池总容量,能持续供应该机器人正常工作多少小时?
(3)若电压表示数小于等于3V时,电动机开始工作.求电压表示数为3V时,光照强度为多少?
5. 向两个完全相同且质量不计的轻质塑料瓶中装入体积相等、密度为ρA的液体后密封,把它们分别盛有密度为ρ甲、ρ乙两种液体的容器中.如图所示,两容器内液面刚好相平,且两个塑料瓶的瓶底和瓶口均相平.若塑料瓶在甲、乙两种液体中所受浮力分别为F甲、F乙,甲、乙两种液体对容器底部的压强分别为P甲和P乙,则以下判断正确的是( )
向两个完全相同且质量不计的轻质塑料瓶中装入体积相等、密度为ρA的液体后密封,把它们分别盛有密度为ρ甲、ρ乙两种液体的容器中.如图所示,两容器内液面刚好相平,且两个塑料瓶的瓶底和瓶口均相平.若塑料瓶在甲、乙两种液体中所受浮力分别为F甲、F乙,甲、乙两种液体对容器底部的压强分别为P甲和P乙,则以下判断正确的是( )
向两个完全相同且质量不计的轻质塑料瓶中装入体积相等、密度为ρA的液体后密封,把它们分别盛有密度为ρ甲、ρ乙两种液体的容器中.如图所示,两容器内液面刚好相平,且两个塑料瓶的瓶底和瓶口均相平.若塑料瓶在甲、乙两种液体中所受浮力分别为F甲、F乙,甲、乙两种液体对容器底部的压强分别为P甲和P乙,则以下判断正确的是( )| A. | ρ甲<ρ乙,F甲=F乙 | B. | P甲=P乙,ρ甲>ρ乙 | C. | P甲>P乙,ρ甲>ρ乙 | D. | P甲=P乙,F甲=F乙 |
15. 某物体兴趣小组利用如图所示做探究电磁感应实验,得到如下记录表格(实验中磁铁不运动):
某物体兴趣小组利用如图所示做探究电磁感应实验,得到如下记录表格(实验中磁铁不运动):
综合分析上面的实验记录,解答下列问题:
(1)①比较实验序号3和5可知,产生感应电流的条件之一是:电路闭合.
②比较实验序号1、2、3、4可知,产生感应电流的另一个条件是:闭合电路中的一部分导体做切割磁感线运动.
(2)①比较实验序号4、6可知:磁场方向会影响感应电流的方向.
②比较实验序号3和4可知:导体运动方向会影响感应电流的方向.
某物体兴趣小组利用如图所示做探究电磁感应实验,得到如下记录表格(实验中磁铁不运动):| 实验序号 | 磁极位置 | 开关情况 | 导体运动情况 | 电流表指针编转情况 |
| 1 | 上N下S | 闭合 | 不运动 | 不偏转 |
| 2 | 上N下S | 闭合 | 上下运动 | 不偏转 |
| 3 | 上N下S | 闭合 | 水平向右运动 | 向左偏转 |
| 4 | 上N下S | 闭合 | 水平向左运动 | 向右偏转 |
| 5 | 上N下S | 断开 | 水平向右运动 | 不偏转 |
| 6 | 上S下N | 闭合 | 水平向左运动 | 向左偏转 |
(1)①比较实验序号3和5可知,产生感应电流的条件之一是:电路闭合.
②比较实验序号1、2、3、4可知,产生感应电流的另一个条件是:闭合电路中的一部分导体做切割磁感线运动.
(2)①比较实验序号4、6可知:磁场方向会影响感应电流的方向.
②比较实验序号3和4可知:导体运动方向会影响感应电流的方向.
 如图所示的电路,小灯泡L标有“6V 3W”字样,R是阻值为10Ω 的定值电阻.当小灯泡的电功率为3W时,定值电阻R消耗的功率是3.6W,电流表的示数为1.1A,电源电压为6V.
如图所示的电路,小灯泡L标有“6V 3W”字样,R是阻值为10Ω 的定值电阻.当小灯泡的电功率为3W时,定值电阻R消耗的功率是3.6W,电流表的示数为1.1A,电源电压为6V.
 小明家在装修房子,他想知道大理石密度的大小,就利用托盘天平和量筒对一小块大理石进行测量.
小明家在装修房子,他想知道大理石密度的大小,就利用托盘天平和量筒对一小块大理石进行测量.