题目内容
14. 为了研究电荷间的相互作用跟什么因素有关,晓彤做了如图实验:把一个带正电的物体放在A处,然后将挂在丝线上的带正电的小球先后挂在P1,P2,P3处,发现的情况如图所示,由此晓彤归纳得出的初步结论是( )
为了研究电荷间的相互作用跟什么因素有关,晓彤做了如图实验:把一个带正电的物体放在A处,然后将挂在丝线上的带正电的小球先后挂在P1,P2,P3处,发现的情况如图所示,由此晓彤归纳得出的初步结论是( )| A. | 电荷间的相互作用力大小随距离增大而减小 | |
| B. | 电荷间的相互作用力大小随距离增大而增大 | |
| C. | 电荷间的相互作用力大小随距离增大而先增大后减小 | |
| D. | 电荷间的相互作用力大小跟距离无关 |
分析 同种电荷相互排斥,A处固定,带电的小球挂在丝线上,通过图中细线偏转的角度,可以判断带电小球带有正电荷,偏转角度越大,受到的电荷间的作用力越大.
解答 解:小球远离带正电的A球,说明细线悬挂的小球带正电,悬挂的小球离带正电的A球越远,受到的作用力越小,同种电荷距离越近排斥作用越强,所以,电荷之间的相互作用跟距离有关,且电荷间的作用力大小随电荷间距离的增大而减小.故A正确,BCD错误.
故选A.
点评 掌握电荷间的作用,通过悬挂小球是靠近带正电的A球,还是远离靠近带正电的A球,判断悬挂小球带什么电荷;关键是知道偏转角度越大,受到的电荷间的作用力越大.

练习册系列答案
相关题目
18.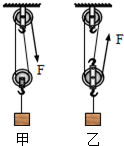 某实验小组分别用图所示的甲、乙两个滑轮组(每个滑轮重相同)匀速提起相同的重物,上升相同的高度.不计绳重及摩擦,则下列说法正确的是( )
某实验小组分别用图所示的甲、乙两个滑轮组(每个滑轮重相同)匀速提起相同的重物,上升相同的高度.不计绳重及摩擦,则下列说法正确的是( )
某实验小组分别用图所示的甲、乙两个滑轮组(每个滑轮重相同)匀速提起相同的重物,上升相同的高度.不计绳重及摩擦,则下列说法正确的是( )| A. | 甲图更省力,两图机械效率相同 | B. | 甲图更省力,而且机械效率高 | ||
| C. | 乙图更省力,两图机械效率相同 | D. | 乙图更省力,而且机械效率高 |
19. 送餐机器人是智能商务电器的一种.正逐渐进入我们的生活,如图所示,是张家界中商广场出现的一款.该机器人在1min内沿直线匀速移动的距离为18m,若它在移动中所受阻力为200N,其他部分参数如表,请你:
送餐机器人是智能商务电器的一种.正逐渐进入我们的生活,如图所示,是张家界中商广场出现的一款.该机器人在1min内沿直线匀速移动的距离为18m,若它在移动中所受阻力为200N,其他部分参数如表,请你:
(1)画出其未服务静止时所受力的示意图.
(2)求出其未服务静止时,它对水平地面的压强是多少?
(3)此机器人在送餐服务时运动的速度为多大?
(4)此机器人1min送餐服务过程中克服阻力所做的功及功率分别是多大?
送餐机器人是智能商务电器的一种.正逐渐进入我们的生活,如图所示,是张家界中商广场出现的一款.该机器人在1min内沿直线匀速移动的距离为18m,若它在移动中所受阻力为200N,其他部分参数如表,请你:| 身高 | 160cm |
| 体重 | 50Kg |
| 续航时间 | 12h |
| 托盘承受重力 | 5Kg |
| 与地面接触面积 | 10-2m2 |
(2)求出其未服务静止时,它对水平地面的压强是多少?
(3)此机器人在送餐服务时运动的速度为多大?
(4)此机器人1min送餐服务过程中克服阻力所做的功及功率分别是多大?
2.某实验小组探究并联电路中电流的关系,他们设计的电路如图1所示.把电流表分别接入到电路中的ABC处,测出它们的电流,填入如表:

(1)在某次接入电流表试触时,电流表的指针偏向如图2所示的位置,你认为原因可能是电流表正负接线柱接反了.
(2)在实验过程中他们连接了如图3所示的电路,闭合开关后,观察灯L2不发光(填“发光”或“不发光”),通过分析电路连接情况,该电路存在的问题是L2被短路.
(3)如表格所记录的数据中,明显错误的数值是1.50,造成错误的原因是看成了0~3A的量程.
(4)测量三次的目的是:找普遍规律,在实验中可以采用换用不同规格的灯泡的方法改变ABC处电流的大小从而进行多次实验;
(5)改正数据后,综合分析可以得出结论是:并联电路中,干路中的电流等于各支路电流之和;
(6)分析数据、结合你用一个电流表做实验时的体会,第三次实验中应注意重新确定电流表的量程,并提出一条对本实验的改进意见:用三个电流表同时分别接在ABC处进行实验.
| 次数 | Ia/A | Ib/A | Ic/A |
| 1 | 0.10 | 0.20 | 1.50 |
| 2 | 0.20 | 0.40 | 0.60 |
| 3 | 0.25 | 0.50 | 0.70 |
(2)在实验过程中他们连接了如图3所示的电路,闭合开关后,观察灯L2不发光(填“发光”或“不发光”),通过分析电路连接情况,该电路存在的问题是L2被短路.
(3)如表格所记录的数据中,明显错误的数值是1.50,造成错误的原因是看成了0~3A的量程.
(4)测量三次的目的是:找普遍规律,在实验中可以采用换用不同规格的灯泡的方法改变ABC处电流的大小从而进行多次实验;
(5)改正数据后,综合分析可以得出结论是:并联电路中,干路中的电流等于各支路电流之和;
(6)分析数据、结合你用一个电流表做实验时的体会,第三次实验中应注意重新确定电流表的量程,并提出一条对本实验的改进意见:用三个电流表同时分别接在ABC处进行实验.
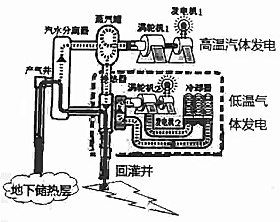 如题图所示,中国研发的二进制地热发电是利用热源进行二次发电,涡轮机1是被高温、高压水蒸汽推动后带动发电机1发电;涡轮机2是利用沸点较低的介质戊烷或异丁烷之类的有机物质、氨与水的混合液等进行加热,产生低温、高压蒸汽推动后带动发电机2发1体发电.这样高温和低温蒸汽都能够被充分利用.据推算日本到2020年可开发12万千瓦的低温(53~120℃)热源进行发电.
如题图所示,中国研发的二进制地热发电是利用热源进行二次发电,涡轮机1是被高温、高压水蒸汽推动后带动发电机1发电;涡轮机2是利用沸点较低的介质戊烷或异丁烷之类的有机物质、氨与水的混合液等进行加热,产生低温、高压蒸汽推动后带动发电机2发1体发电.这样高温和低温蒸汽都能够被充分利用.据推算日本到2020年可开发12万千瓦的低温(53~120℃)热源进行发电. 用如图所示的实验装置探究“阻力对物体运动的影响”.
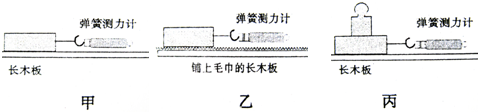
用如图所示的实验装置探究“阻力对物体运动的影响”.