题目内容
8. 夹取细小物体的镊子在使用时属于费力杠杆;如图所示,用始终水平方向的力,将杠杆慢慢地由位置A拉到位置B,拉力F大小变大(填“变大”、“不变”或“变小”).
夹取细小物体的镊子在使用时属于费力杠杆;如图所示,用始终水平方向的力,将杠杆慢慢地由位置A拉到位置B,拉力F大小变大(填“变大”、“不变”或“变小”).
分析 (1)结合生活经验,判断杠杆在使用过程中,动力臂和阻力臂的大小关系,再判断它是属于哪种类型的杠杆;
(2)从支点向力的作用线作垂线,垂线段的长度即力臂.根据杠杆平衡条件F1L1=F2L2分析,将杠杆缓慢地由位置A拉到位置B,阻力不变,阻力力臂变大,力F作用在杠杆一端且始终是水平方向,即方向不变,所以动力臂变小,则动力变大.
解答 解:(1)由生活经验可知,镊子在使用时,动力臂小于阻力臂,是费力杠杆;
(2)将杠杆缓慢地由位置A拉到位置B,阻力G的力臂变大,而阻力不变;
力F作用在杠杆一端且始终是水平方向,即方向不变,所以动力臂变小,
根据杠杆平衡条件F1L1=F2L2分析得出动力F变大.
故答案为:费力;变大.
点评 (1)杠杆的分类主要包括以下几种:①省力杠杆,动力臂大于阻力臂;②费力杠杆,动力臂小于阻力臂;③等臂杠杆,动力臂等于阻力臂;
(2)本题考查学生对杠杆平衡条件的理解和灵活运用,能准确判断阻力臂和动力臂的变化情况是本题的关键.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
5. 如图所示,底面积相同的圆柱形容器甲、乙放在同一水平地面上,内盛有两种不同的液体.将装有相同实心铁球的相同烧杯放入容器甲、乙后均能漂浮在液面上,此时液面的高度相同;现将两铁球从杯中取出并分别放入容器甲、乙的液体中,铁球均沉底,液体对容器底部压力的变化量分别为△F甲、△F乙,则下列关系正确的是( )
如图所示,底面积相同的圆柱形容器甲、乙放在同一水平地面上,内盛有两种不同的液体.将装有相同实心铁球的相同烧杯放入容器甲、乙后均能漂浮在液面上,此时液面的高度相同;现将两铁球从杯中取出并分别放入容器甲、乙的液体中,铁球均沉底,液体对容器底部压力的变化量分别为△F甲、△F乙,则下列关系正确的是( )
如图所示,底面积相同的圆柱形容器甲、乙放在同一水平地面上,内盛有两种不同的液体.将装有相同实心铁球的相同烧杯放入容器甲、乙后均能漂浮在液面上,此时液面的高度相同;现将两铁球从杯中取出并分别放入容器甲、乙的液体中,铁球均沉底,液体对容器底部压力的变化量分别为△F甲、△F乙,则下列关系正确的是( )| A. | △F甲一定大于△F乙 | B. | △F甲一定小于△F乙 | ||
| C. | △F甲可能大于△F乙 | D. | △F甲可能小于△F乙 |
3.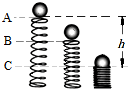 如图所示用手将一重为G的铁球缓慢地放在一弹簧上,放手后,铁球从A位置开始向下运动,到达B位置速度达到最大,到达C位置小球的速度变为零.已知AC间的高度差为h.(整个过程中不计能量损失)( )
如图所示用手将一重为G的铁球缓慢地放在一弹簧上,放手后,铁球从A位置开始向下运动,到达B位置速度达到最大,到达C位置小球的速度变为零.已知AC间的高度差为h.(整个过程中不计能量损失)( )
如图所示用手将一重为G的铁球缓慢地放在一弹簧上,放手后,铁球从A位置开始向下运动,到达B位置速度达到最大,到达C位置小球的速度变为零.已知AC间的高度差为h.(整个过程中不计能量损失)( )| A. | 铁球由A运动到C的过程中,弹力总小于重力 | |
| B. | 铁球在B位置时受到的重力和弹力是平衡力 | |
| C. | 铁球A位置时的机械能等于B位置时的机械能 | |
| D. | 铁球由A位置到C位置,重力所做的功为Gh |
 在“探究电阻上的电流跟两端电压的关系”实验中,定值电阻R=50Ω,电源电压保持不变.
在“探究电阻上的电流跟两端电压的关系”实验中,定值电阻R=50Ω,电源电压保持不变.
13.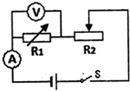 如图所示的电路,电源电压恒定,某同学用该电路验证“在导体两端的电压一定时,通过导体的电流与导体的电阻成反比”.他多次制改变电阻箱R1的阻值,测得相应的电流值,如表所示:
如图所示的电路,电源电压恒定,某同学用该电路验证“在导体两端的电压一定时,通过导体的电流与导体的电阻成反比”.他多次制改变电阻箱R1的阻值,测得相应的电流值,如表所示:
(1)根据表中数据,通过导体的电流与导体的电阻不成(选填“成”或“不成”)反比,其原因是没有控制电阻箱R1两端的电压不变.
(2)此实验中,电源电压为3V,滑动变阻器接入的阻值为5Ω.
如图所示的电路,电源电压恒定,某同学用该电路验证“在导体两端的电压一定时,通过导体的电流与导体的电阻成反比”.他多次制改变电阻箱R1的阻值,测得相应的电流值,如表所示:| 实验序号 | R1/Ω | I/A |
| ① | 5 | 0.30 |
| ② | 10 | 0.20 |
| ③ | 15 | 0.15 |
(2)此实验中,电源电压为3V,滑动变阻器接入的阻值为5Ω.
20. 如图所示是“歼-15飞机”在航母“辽宁舰”上的起降示意图.当“歼-15飞机”在航母上着舰后,下列说法正确的是( )
如图所示是“歼-15飞机”在航母“辽宁舰”上的起降示意图.当“歼-15飞机”在航母上着舰后,下列说法正确的是( )
如图所示是“歼-15飞机”在航母“辽宁舰”上的起降示意图.当“歼-15飞机”在航母上着舰后,下列说法正确的是( )| A. | 航母将上浮一些,航母和“歼-15飞机”整体所受水的浮力减小 | |
| B. | 航母将下沉一些,航母和“歼-15飞机”整体所受水的浮力增大 | |
| C. | 航母将上浮一些,航母和“歼-15飞机”整体所受水的浮力增大 | |
| D. | 航母将下沉一些,航母和“歼-15飞机”整体所受水的浮力不变 |
17. 在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量力臂;如发现杠杆左端偏高,则可将平衡螺母向左调节.
在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量力臂;如发现杠杆左端偏高,则可将平衡螺母向左调节.
如图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在表中.
(1)请将表格中的实验数据补充完整.
(2)小明的第3次实验存在错误,其错误是弹簧测力计没有竖直向下拉(或动力臂测量错误).
在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量力臂;如发现杠杆左端偏高,则可将平衡螺母向左调节.| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | |
| 2 | 1 | 20 | 2 | 10 |
| 3 | 1 | 20 | 1.5 | 10 |
(1)请将表格中的实验数据补充完整.
(2)小明的第3次实验存在错误,其错误是弹簧测力计没有竖直向下拉(或动力臂测量错误).