题目内容
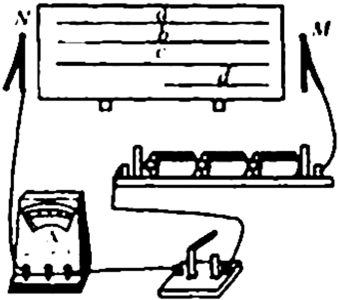
7.在研究杠杆的平衡条件实验中:(1)实验前杠杆倾斜情况如图(A)所示,为使它在水平位置平衡,可将左端的平衡螺母向左(选填“左”、“右”)移动.使杠杆在水平位置平衡的好处是便于从杠杆上直接读取力臂.
(2)实验中共有10个相同的钩码,如图(B)所示,杠杆上每格等距,

当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
答:①在C处挂上6个钩码;②在D处挂上4个钩码.
(3)如果某组同学在实验前猜想杠杆平衡的条件可能是“动力+动力臂=阻力+阻力臂”.他们经过实验,获得了如下表所示的数据:
| 动力F1(N) | 动力臂l1(cm) | 阻力F2(N) | 阻力臂l2(cm) |
| 4 | 5 | 5 | 4 |
答:从一次实验便得到实验结论,结论具有片面性和偶然性;
(4)此实验得出的正确结论是动力×动力臂=阻力×阻力臂.
分析 (1)杠杆右端下沉,说明杠杆的重心在支点右侧,调节平衡螺母应使杠杆重心左移,这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响;杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂的长度可以直接从杠杆上读出来;
(2)由杠杆平衡条件:动力×动力臂=阻力×阻力臂,判断出右边四个钩码挂3格处时,左边应是几个钩码应挂几格处;
(3)杠杆的平衡条件是:动力×动力臂=阻力×阻力臂,在实验中,为得出普遍结论应改变实验条件,进行多次测量
解答 解:(1)发现杠杆左端高、右端低,杠杆重心应左移,应将平衡螺母(左端和右端的均可)向左调节,直至杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆标尺刻度上直接读出来,所以这样做的好处是便于从杠杆上直接读取力臂;
(2)设每个钩码重G,每格长为L,当在A点挂4个钩码时,4G×3L=12GL,
根据杠杆的平衡条件,在不超过总数10个钩码的前提下,有如下方案可供选择:
2G×6L=12GL,即在G处挂2钩码;
3G×4L=12GL,即在E处挂3钩码;
4G×3L=12GL,即在D处挂4钩码;
6G×2L=12GL,即在C处挂6钩码.
(3)由题意知,该同学进行了一次实验便得出了结论,实验数据比较特殊,所以结论具有片面性和偶然性,从一次实验是不能得到实验的结论的,这里存在很大的偶然性;应改变力和力臂,多测几组数据分析得出结论.
(4)此实验得出的正确结论是“动力×动力臂=阻力×阻力臂”
故答案为:(1)左;便于从杠杆上直接读取力臂;(2)①在C处挂上6个钩码,②在D处挂上4个钩码;(3)从一次实验便得到实验结论,结论具有片面性和偶然性;(4)动力×动力臂=阻力×阻力臂
点评 此题是探究杠杆平衡条件的实验,考查了实验注意事项,难度不大,为得出普遍结论,应进行多次实验.

 阅读快车系列答案
阅读快车系列答案| A. |
| ||||||||||||||||
| B. |
| ||||||||||||||||
| C. |
| ||||||||||||||||
| D. |
| ||||||||||||||||
| A. | 人用热水袋取暖 | B. | 钻木取火 | ||
| C. | 刀被砂轮磨得发烫 | D. | 冬天手冷时,搓手取暖 |
 如图所示是现在一般标准住宅的配电系统方框图,其中导线a、b进户线,火线是a,方框1安装的是电能表(选填“空气开关”、“电能表”或“用电器”),三孔插座上面孔接地线(选填“用电器金属外壳”、“零线”或“地线”).
如图所示是现在一般标准住宅的配电系统方框图,其中导线a、b进户线,火线是a,方框1安装的是电能表(选填“空气开关”、“电能表”或“用电器”),三孔插座上面孔接地线(选填“用电器金属外壳”、“零线”或“地线”).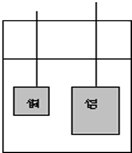
| A. | “托里拆利实验”测出了大气压的数值 | |
| B. | “马德堡半球实验”证明了大气压的存在 | |
| C. | 牛顿最早通过“斜面实验”得出力不是维持物体运动的原因 | |
| D. | 阿基米德通过实验研究,发现了浮力原理,即液体对物体的浮力等于物体所排开液体的重力 |
| 时间/min | 0 | 1 | 2 | 3 | 4 | 5 |
| 水的温度/℃ | 20 | 22 | 24 | 26 | 28 | 30 |
| 某种液体的 温度/℃ | 20 | 23 | 26 | 29 | 32 | 35 |
(1)在加热时间相同的条件下,升温快的是某种液体;
(2)如果它们升高相同的温度,水吸收的热量多;
(3)在设计实验方案时,需要确定以下控制的变量,你认为其中多余的是B.
A.采用完全相同的加热方式 B.酒精灯里所加酒精量相同
C.取相同质量的水和另一种液体 D.盛放水和另一种液体的容器相同
(4)由此可根据公式Q=cm△t,推出c水>c液(填“>”“<”或“=”);
(5)实验中有些同学发现:刚开始加热时,水的温度上升的比食用油快,你认为可能的原因是:液体受热不均匀.