题目内容
15.如图,在做“研究平面镜成像特点”的实验时:
(1)小华在玻璃板的前面放一支点燃的蜡烛A,在玻璃板的后面放一支没有点燃的蜡烛B,对蜡烛A、B的要求是大小相等,目的是为了验证平面镜成像时物像大小相等.
(2)在实验中用透明的玻璃板代替平面镜,主要是利用玻璃透明的特点,便于确定像的位置.
(3)在寻找蜡烛像的位置时,小华无论怎样调节后面的蜡烛,都不能与蜡烛的像重合,可能的原因是玻璃板与桌面不垂直.
(4)小明用跳棋替代蜡烛进行实验,但看不清跳棋的像.请你帮他想个办法看清跳棋的像:用手电筒照亮跳棋子.
(5)移开棋子B,用白纸做屏幕放在该位置,直接观察白纸能否出现棋子的像,结果是白纸上没有(填“有”或“没有”)棋子的像,这说明平面镜所成的像是虚像.
分析 (1)实验时采用两个完全相同的蜡烛,一支蜡烛放在玻璃板的前面并点燃,另一支放在玻璃板的后面,当玻璃板后面的蜡烛和玻璃板前面的蜡烛的像完全重合时,可以比较物像大小关系.
(2)探究平面镜成像实验中,要用透明的玻璃板代替平面镜,虽然成像不太清晰,但是在物体一侧能看到物体的像,同时还能看到代替物体的另一个物体,便于确定像的位置.
(3)无论怎样调节后面的蜡烛B,都不能与蜡烛A的像重合,可能玻璃板和水平面不垂直;
(4)平面镜成像时,成像物体越亮,环境越暗,物体成像越清晰;
(5)平面镜所成的像是反射光线的反向延长线会聚而成的,不是实际光线会聚成而,所以成的像是虚像,用光屏接收不到,只能用眼睛观察.
解答 解:(1)蜡烛A.B的要求是大小相等目的是为了验证平面镜成像时物像大小相等关系.
(2)用透明的玻璃板代替平面镜,虽然成像不太清晰,但是在A一侧能看到物体A的像,同时还能看到代替A的另一个B物体,便于确定像的位置.
(3)玻璃板没有竖直放置,A蜡烛所成的像可能偏高或偏低,这样B蜡烛与A蜡烛的像就无法重合了;
(4)用手电筒照亮跳棋子,棋子反射出的光线增多,棋子成像更清晰;
(5)光屏能接收到实像,但接收不到虚像,因为平面镜成的是虚像,所以光屏上没有蜡烛的像.
故答案为:(1)大小相等;验证平面镜成像时物像大小相等;(2)确定像的位置;(3)玻璃板与桌面不垂直;(4)用手电筒照亮跳棋子;(5)没有;虚.
点评 探究平面镜成像特点的实验过程,在近年中考题中较为热点.只要牢记平面镜成像的特点,解答此类题目就不难.

练习册系列答案
相关题目
6.小华同学对于身边物理量的大小进行了估测,下列估测中接近实际的是( )
| A. | 一个玻璃杯的质量约为5kg | |
| B. | 初中物理课本的宽度约为10.5cm | |
| C. | 一块橡皮从课桌表面掉到地上的时间约为4s | |
| D. | 成年人正常步行5min通过的路程约为3600m |
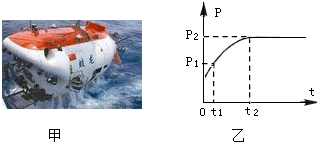
3. 如图所示是一种风速测定装置,其中风速表是由电压表改装而成,R为定值电阻,R1为滑动变阻器,T型管道的竖直管内装有可上下无摩擦自由移动的轻质活塞,活塞通过轻质细杆和滑动变阻器的滑片P相连.S闭合后,当风速增大时( )
如图所示是一种风速测定装置,其中风速表是由电压表改装而成,R为定值电阻,R1为滑动变阻器,T型管道的竖直管内装有可上下无摩擦自由移动的轻质活塞,活塞通过轻质细杆和滑动变阻器的滑片P相连.S闭合后,当风速增大时( )
如图所示是一种风速测定装置,其中风速表是由电压表改装而成,R为定值电阻,R1为滑动变阻器,T型管道的竖直管内装有可上下无摩擦自由移动的轻质活塞,活塞通过轻质细杆和滑动变阻器的滑片P相连.S闭合后,当风速增大时( )| A. | 活塞上方气压变小,活塞向上运动,风速表的示数变大 | |
| B. | 活塞上方气压不变,活塞静止不动,风速表的示数不变 | |
| C. | 活塞上方气压变大,活塞向下运动,风速表的示数变大 | |
| D. | 活塞向上运动,电路消耗的总功率变大 |
20.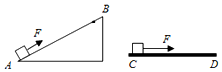 如图所示,用大小相等的拉力F,分别沿光滑的斜面和粗糙的水平面拉木箱,在力的作用下移动的距离sAB=sCD,比较两种情况下拉力F所做的功及其功率( )
如图所示,用大小相等的拉力F,分别沿光滑的斜面和粗糙的水平面拉木箱,在力的作用下移动的距离sAB=sCD,比较两种情况下拉力F所做的功及其功率( )
如图所示,用大小相等的拉力F,分别沿光滑的斜面和粗糙的水平面拉木箱,在力的作用下移动的距离sAB=sCD,比较两种情况下拉力F所做的功及其功率( )| A. | AB段与CD段做的功一样多 | B. | AB段的功率比CD段的功率大 | ||
| C. | AB段做功较多 | D. | CD段做功较多 |
7.有人做过这样一个实验:将气球放在一根钉子上,并用一定大小的力按压气球时,气球会被钉子扎破;若想气球放在钉子密集的钉子板上,用相同大小的力按压气球时,气球就不会被扎破.第二种现象之所以会发生,是因为( )
| A. | 气球的总受力面积变大,压强变小 | B. | 气球的总受力面积变小,压强变大 | ||
| C. | 气球受到的压力变大,压强变大 | D. | 气球受到的压力变大,压强变大 |
4.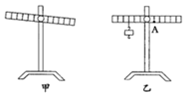 燕燕同学想要探究“杠杆的平衡条件”,于是她从实验室取来了一个杠杆和若干个所受重力为1N的钩码来进行实验.
燕燕同学想要探究“杠杆的平衡条件”,于是她从实验室取来了一个杠杆和若干个所受重力为1N的钩码来进行实验.
(1)如图甲所示,燕燕从实验室取来的杠杆没有在水平位置平衡.若想使它在水平位置平衡,燕燕应该将左端的螺母向左(选填“左”或“右”)移动.
(2)燕燕使杠杆处于水平位置平衡后,在杠杆的左侧挂了1个钩码(如图乙所示).若要使杠杆再次在水平位置平衡,她应该在A点悬挂3个钩码.
(3)上表是燕燕通过实验得到杠杆在水平位置平衡时的数据,请将表格补充完整.
(4)根据实验可知:动力×动力臂=阻力×阻力臂.
燕燕同学想要探究“杠杆的平衡条件”,于是她从实验室取来了一个杠杆和若干个所受重力为1N的钩码来进行实验. | 实验次数 | 动力/N | 动力臂/cm | 阻力/N | 阻力臂/cm |
| 1 | 2 | 1 | 1 | 2 |
| 2 | 3 | 4 | 2 | 6 |
| 3 | 3 | 3 | 5 | |
| 4 | 6 | 4 | 6 | 4 |
(2)燕燕使杠杆处于水平位置平衡后,在杠杆的左侧挂了1个钩码(如图乙所示).若要使杠杆再次在水平位置平衡,她应该在A点悬挂3个钩码.
(3)上表是燕燕通过实验得到杠杆在水平位置平衡时的数据,请将表格补充完整.
(4)根据实验可知:动力×动力臂=阻力×阻力臂.