题目内容
17.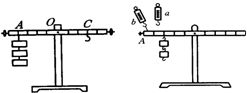 如图所示,某小组研究杠杆的平衡条件,器材:有刻度的杠杆,若干个相同的钩码、弹簧测力计等,O为杠杆的支点.
如图所示,某小组研究杠杆的平衡条件,器材:有刻度的杠杆,若干个相同的钩码、弹簧测力计等,O为杠杆的支点.(1)实验前,应先调节平衡螺母使它在水平位置平衡,调节时,如发现杠杆左端偏高,应将两边的螺母向左调节.
(2)某同学记录了三组数据如下表:
| 序号 | 动力F1/N | 动力臂l1/m | 阻力F2/N | 阻力臂l2/m |
| 1 | 1.96 | 0.04 | 3.92 | 0.02 |
| 2 | 0.98 | 0.02 | 0.49 | 0.01 |
| 3 | 2.45 | 0.03 | 1.47 | 0.05 |
F1L1=F2L2.
(3)如图所示,当在A处挂了三个钩码时,要使杠杆平衡,应在C处挂4个钩码(每个钩码的质量相等).
(4)若某次实验中用弹簧测力计竖直向上拉杠杆一端的A点,如图a位置时所示,杠杆平衡时,弹簧测力计的示数为Fa;若在A点斜向上拉,如图b位置时所示,杠杆要求在水平位置再次平衡时,弹簧测力计的示数为Fb,则Fa小于Fb(选填“大于”、“小于”或“等于”).
分析 (1)杠杆在水平位置平衡,杠杆的重心在支点处,可消除杠杆重对杠杆平衡的影响;若拉力与杠杆垂直,则力臂在杠杆上,也便于测量力臂的大小;
杠杆平衡调节原则是:右低将平衡螺母左调,左低将平衡螺母右调;
(2)杠杆的平衡条件为:动力×动力臂=阻力×阻力臂(或F1L1=F2L2),分别计算动力与动力臂的乘积、阻力与阻力臂的乘积,然后进行比较可得到答案.
(3)根据杠杆平衡条件计算出C处挂的钩码个数.
(4)若在A点斜向上拉,拉力的方向改变,拉力的力臂发生改变,结合图示和杠杆平衡条件判断两次拉力的大小关系.
解答 解:(1)杠杆在水平位置平衡,杠杆的重心在支点处,可消除杠杆自重对杠杆平衡的影响;当力与杠杆垂直时,则力臂在杠杆上,也便于测量力臂的大小;
如发现杠杆左端偏高,即右端偏低,此时杠杆的重心在支点右侧,应将两边的螺母向左端移动,使得杠杆的重心左移到支点处.
(2)由表中实验数据可知:
第2次实验时,F1L1=0.98N×0.02m=0.0196N•m,F2L2=0.49N×0.01m=0.0049N•m;
因为F1L1≠F2L2,所以第2次实验数据有误;
由表中正确的实验数据可知,杠杆平衡时,满足F1L1=F2L2,故杠杆的平衡条件为:F1L1=F2L2.
(3)设每个钩码的重力为G,杠杆每格的长度为L,C处挂钩码的个数为n,
由杠杆平衡条件得:3G×4L=nG×3L,解得:n=4,则应在C处挂4个钩码.
(4)由图示可知,测力计在A点斜向上拉时,动力臂变小,阻力与阻力臂不变,由杠杆平衡条件F1L1=F2L2可知,动力变大,Fb大于Fa,即Fa小于Fb.
故答案为:(1)水平;左;(2)2;F1L1=F2L2;(3)4;(4)小于.
点评 解答与杠杆平衡条件相关问题的基本方法:准确找出题中杠杆的五要素,再将对应的动力和动力臂、阻力和阻力臂代入杠杆平衡条件,即可求解.

 中国智能无人机公司亿航,在2016CES国际消费类电子产品展览会上,全球首发全电力低空自动驾驶载人飞行器-“亿航184”,如图所示的是正在自动飞行的“亿航184”,它在飞行过程中的信息是通过电磁波传递给地面指挥中心的,其传递信息速度与光速相等(填“相等”或“不相等”).
中国智能无人机公司亿航,在2016CES国际消费类电子产品展览会上,全球首发全电力低空自动驾驶载人飞行器-“亿航184”,如图所示的是正在自动飞行的“亿航184”,它在飞行过程中的信息是通过电磁波传递给地面指挥中心的,其传递信息速度与光速相等(填“相等”或“不相等”).
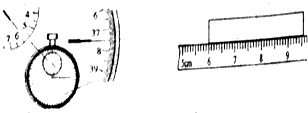 如图所示,秒表的读数为337.5s;用刻度尺测量一个木块的长度,则此木块的长度是3.58cm.
如图所示,秒表的读数为337.5s;用刻度尺测量一个木块的长度,则此木块的长度是3.58cm.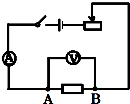 某同学利用如图所示的电路研究“一段电路中的电流跟电阻的关系”.如果把A、B之间的电阻由30欧姆换成20欧姆,为了探究上述问题,他应该采取的措施是( )
某同学利用如图所示的电路研究“一段电路中的电流跟电阻的关系”.如果把A、B之间的电阻由30欧姆换成20欧姆,为了探究上述问题,他应该采取的措施是( )| A. | 增加电池个数 | B. | 把滑动变阻器的滑片向左移动 | ||
| C. | 把滑动变阻器的滑片向右移动 | D. | 滑片的位置不变 |
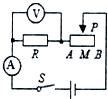 如图所示的电路,电流表使用的量程为0~0.6A,电压表使用的量程为0~15V,定值电阻R=10Ω.开关S闭合,将滑片P从最右端B点移至滑动变阻器中点M,电压表示数变化了1.2V.滑片P在M点时,电流表示数为0.3A.求:
如图所示的电路,电流表使用的量程为0~0.6A,电压表使用的量程为0~15V,定值电阻R=10Ω.开关S闭合,将滑片P从最右端B点移至滑动变阻器中点M,电压表示数变化了1.2V.滑片P在M点时,电流表示数为0.3A.求: 如图所示的电子停表读数是20min58.88s.停表右上按钮旁有字母“START/STOP”,表示这个按钮的作用是开关.
如图所示的电子停表读数是20min58.88s.停表右上按钮旁有字母“START/STOP”,表示这个按钮的作用是开关.