题目内容
9. 端午节赛龙舟时,运动员一手支撑住浆柄,一手用力划桨,此时浆属于费力(选填“省力”或“费力”)杠杆;当运动员向后划桨时,龙舟就向前行进,说明力的作用是相互的的;当龙舟快速前进时,水面中的漂浮物会自动靠近船身,这是因为水中流速大的地方压强小.
端午节赛龙舟时,运动员一手支撑住浆柄,一手用力划桨,此时浆属于费力(选填“省力”或“费力”)杠杆;当运动员向后划桨时,龙舟就向前行进,说明力的作用是相互的的;当龙舟快速前进时,水面中的漂浮物会自动靠近船身,这是因为水中流速大的地方压强小.
分析 (1)结合图片和生活经验,先判断船桨在使用过程中,动力臂和阻力臂的大小关系,再判断它是属于哪种类型的杠杆;
(2)物体间力的作用是相互的;
(3)流体压强与流速的关系:流体流速越大的地方压强越小、流速越小的地方压强越大.
解答 解:
(1)船桨在使用过程中,动力臂小于阻力臂,是费力杠杆,但省距离;
(2)当运动员向后划桨时,桨给水一向后的力,由于物体间力的作用是相互的,水给桨(龙舟)向前的力,使龙舟向前行进;
(3)龙舟快速前进时,水面中的漂浮物会自动靠近船身,这是因为水中流速大的地方压强小.
故答案为:费力;力的作用是相互的;水中流速大的地方压强小.
点评 本题考查的了杠杆的分类、力的相互性和流体压强与流速的关系,属于基础题目.

练习册系列答案
相关题目
19.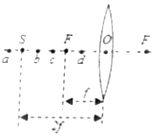 某同学做“探究凸透镜成像的规律”实验时,所用凸透镜的焦距为f,保持凸透镜位置不变,如图所示,先后使蜡烛位于a、b、c、d四点,并分别调整光屏的位置,关于b点的成像情况,下列说法正确的是( )
某同学做“探究凸透镜成像的规律”实验时,所用凸透镜的焦距为f,保持凸透镜位置不变,如图所示,先后使蜡烛位于a、b、c、d四点,并分别调整光屏的位置,关于b点的成像情况,下列说法正确的是( )
某同学做“探究凸透镜成像的规律”实验时,所用凸透镜的焦距为f,保持凸透镜位置不变,如图所示,先后使蜡烛位于a、b、c、d四点,并分别调整光屏的位置,关于b点的成像情况,下列说法正确的是( )| A. | 屏上出现的实像最小 | B. | 屏上出现的是倒立缩小的实像 | ||
| C. | 是放大镜制作的原理 | D. | 比蜡烛在c点时屏上出现的实像小 |
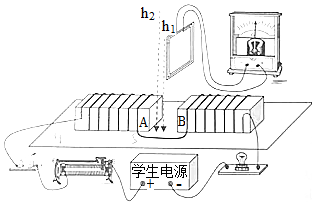 小双想探究感应电流的大小与什么因素有关?他设计了如图所示的装置进行实验.铁块上绕有导线,线框与灵敏电流计(G表示)相连(线框高度大于铁块高度,实验过程中线框不旋转).
小双想探究感应电流的大小与什么因素有关?他设计了如图所示的装置进行实验.铁块上绕有导线,线框与灵敏电流计(G表示)相连(线框高度大于铁块高度,实验过程中线框不旋转).
17. 玻璃窗户的清洁可由如图所示的“自动擦窗机器人”完成.它的质量为1.5千克,“腹部”有吸盘.当真空泵将吸盘内的空气向外抽出时,它能牢固吸在竖直玻璃上.则下列说法符合事实的是( )
玻璃窗户的清洁可由如图所示的“自动擦窗机器人”完成.它的质量为1.5千克,“腹部”有吸盘.当真空泵将吸盘内的空气向外抽出时,它能牢固吸在竖直玻璃上.则下列说法符合事实的是( )
玻璃窗户的清洁可由如图所示的“自动擦窗机器人”完成.它的质量为1.5千克,“腹部”有吸盘.当真空泵将吸盘内的空气向外抽出时,它能牢固吸在竖直玻璃上.则下列说法符合事实的是( )| A. | 此时摩擦力大于15牛 | |
| B. | 此时摩擦力等于15牛 | |
| C. | 此时机器人对玻璃的压力和玻璃对机器人的作用力是一对平衡力 | |
| D. | 若真空泵继续向外抽气,则自动擦窗机器人受到的摩擦力将变大 |
4. 如图所示电路,当开关闭合时,电压表V1、V2的示数分别为5V和2V,已知电动机M的线圈电阻为0.5Ω,R是阻值为2Ω的定值电阻.下列结论正确的是( )
如图所示电路,当开关闭合时,电压表V1、V2的示数分别为5V和2V,已知电动机M的线圈电阻为0.5Ω,R是阻值为2Ω的定值电阻.下列结论正确的是( )
如图所示电路,当开关闭合时,电压表V1、V2的示数分别为5V和2V,已知电动机M的线圈电阻为0.5Ω,R是阻值为2Ω的定值电阻.下列结论正确的是( )| A. | 电动机两端的电压为2V | B. | 通过电动机的电流为3A | ||
| C. | 电阻R消耗的电功率为5W | D. | 电动机输出的机械功率为2.5W |
 2014年4月14日美国“蓝鳍金枪鱼”自主水下航行器首次参与搜索马航失联客机的任务,某科研机构按一定比例做了一个缩小的伪真模型,质量为75kg,水平地面上有一个质量为25kg足够高的长方体平底测量容器.长2.5m,宽0.8m,内装有深度为1米的水,再将该模型缓慢放入水中静止时,有$\frac{1}{6}$的体积露出水面,如图所示.求:(1)该模型漂浮时浸入水中的体积是多少m3?
2014年4月14日美国“蓝鳍金枪鱼”自主水下航行器首次参与搜索马航失联客机的任务,某科研机构按一定比例做了一个缩小的伪真模型,质量为75kg,水平地面上有一个质量为25kg足够高的长方体平底测量容器.长2.5m,宽0.8m,内装有深度为1米的水,再将该模型缓慢放入水中静止时,有$\frac{1}{6}$的体积露出水面,如图所示.求:(1)该模型漂浮时浸入水中的体积是多少m3? 在某建筑工地上,为了搬运建筑材料,常常采用如图所示的简单机械.钢丝绳拉力由电动机提供,电动机将电能转化为机械能的效率为60%,电动机消耗的电能除了线圈发热外,全部用于对钢丝绳做功.此滑轮组在2分钟内将重为4500牛的建筑材料匀速提升12米,所用的拉力为2000N(钢丝绳重和摩擦不计).求:
在某建筑工地上,为了搬运建筑材料,常常采用如图所示的简单机械.钢丝绳拉力由电动机提供,电动机将电能转化为机械能的效率为60%,电动机消耗的电能除了线圈发热外,全部用于对钢丝绳做功.此滑轮组在2分钟内将重为4500牛的建筑材料匀速提升12米,所用的拉力为2000N(钢丝绳重和摩擦不计).求:
18.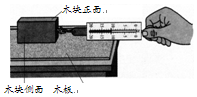 在探究滑动摩擦力实验中,小明用弹簧秤水平拉着木块在水平木板上匀速滑动(如图),进行了6次测定,实验数据整理如下表.(木块因纹路不同,侧面比正面粗糙)
在探究滑动摩擦力实验中,小明用弹簧秤水平拉着木块在水平木板上匀速滑动(如图),进行了6次测定,实验数据整理如下表.(木块因纹路不同,侧面比正面粗糙)
(1)小明认为滑动摩擦力的大小与弹簧秤的拉力大小相等,理由是:木块做匀速直线运动,拉力和摩擦力是一对平衡力.
(2)比较分析实验次数1、2、3(或4、5、6),可以发现滑动摩擦力的大小与物体受到的压力大小有关.
(3)比较实验次数1和4,小明发现木块受到的滑动摩擦力不同,小明认为有可能是由于接触面积大小不同引起的.为了研究这个问题,在不增加任何辅助工具的前提下,请你简要设计实验方案:使用同一个接触 面,将木块露出桌面,用弹簧测力计匀速拉着木块,比较两次示数.
在探究滑动摩擦力实验中,小明用弹簧秤水平拉着木块在水平木板上匀速滑动(如图),进行了6次测定,实验数据整理如下表.(木块因纹路不同,侧面比正面粗糙)| 次数 | 接触面 | 压力/N | 弹簧测力计示数/N |
| 1 | 木块正面 | 1.7 | 0.3 |
| 2 | 木块正面 | 3.7 | 0.8 |
| 3 | 木块正面 | 5.7 | 1.2 |
| 4 | 木块侧面 | 1.7 | 0.6 |
| 5 | 木块侧面 | 3.7 | 1.5 |
| 6 | 木块侧面 | 5.7 | 2.5 |
(2)比较分析实验次数1、2、3(或4、5、6),可以发现滑动摩擦力的大小与物体受到的压力大小有关.
(3)比较实验次数1和4,小明发现木块受到的滑动摩擦力不同,小明认为有可能是由于接触面积大小不同引起的.为了研究这个问题,在不增加任何辅助工具的前提下,请你简要设计实验方案:使用同一个接触 面,将木块露出桌面,用弹簧测力计匀速拉着木块,比较两次示数.