题目内容
13.质量为 3kg的铅球正在空中飞行,(若不计空气阻力)那么铅球只受到重力的作用,这个力的大小是30N,方向是竖直向下的,作用点在球心,施力物体是地球.(g=10N/kg)分析 根据物体受力情况进行受力分析,再根据G=mg计算出重力的大小;重力方向总是竖直向下的,重力的作用点即重心,根据重力的产生原因确定重力的施力物体.
解答 解:
在空中飞行的铅球不考虑空气阻力,铅球只受重力作用;
重力大小为:G=mg=3kg×10N/kg=30N;
重力的方向总是竖直向下的,规则物体的重心为物体的几何中心即铅球重心,重力是由于地球的吸引而产生的,所以重力的施力物为地球.
故答案为:重;30N;竖直向下;球心;地球.
点评 会确定物体的重心,知道重力的方向总是竖直向下的,会根据重力的计算公式进行计算.

练习册系列答案
相关题目
3.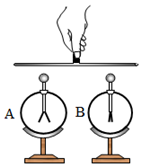 如图所示,取两个相同的验电器A和B,使A带负电,B不带电,用带有绝缘手柄的金属棒把A和B连接起来.下列说法正确的是( )
如图所示,取两个相同的验电器A和B,使A带负电,B不带电,用带有绝缘手柄的金属棒把A和B连接起来.下列说法正确的是( )
如图所示,取两个相同的验电器A和B,使A带负电,B不带电,用带有绝缘手柄的金属棒把A和B连接起来.下列说法正确的是( )| A. | B中正电荷通过金属棒流向A,A金属箔的张角减小 | |
| B. | 金属棒中瞬间电流的方向从A流向B,B金属箔的张角增大 | |
| C. | A中负电荷通过金属棒流向B,B中正电荷通过金属棒流向A | |
| D. | A中的自由电子通过金属棒流向B,B金属箔的张角增大 |
1.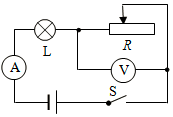 如图所示,电源电压恒为18V,小灯泡的铭牌为“6V 3W”,滑动变阻器的规格为“100Ω 1A”,所用电流表的量程为0~0.6A或0~3A;所用电压表的量程为0~3V或0~15V.闭合开关后,在变阻器滑片P移动过程中,要求两电表的示数均不超过所选量程,且灯泡两端的电压不允许超过额定电值的情况下,下列说法正确的是( )(不考虑温度对灯丝电阻的影响)
如图所示,电源电压恒为18V,小灯泡的铭牌为“6V 3W”,滑动变阻器的规格为“100Ω 1A”,所用电流表的量程为0~0.6A或0~3A;所用电压表的量程为0~3V或0~15V.闭合开关后,在变阻器滑片P移动过程中,要求两电表的示数均不超过所选量程,且灯泡两端的电压不允许超过额定电值的情况下,下列说法正确的是( )(不考虑温度对灯丝电阻的影响)
如图所示,电源电压恒为18V,小灯泡的铭牌为“6V 3W”,滑动变阻器的规格为“100Ω 1A”,所用电流表的量程为0~0.6A或0~3A;所用电压表的量程为0~3V或0~15V.闭合开关后,在变阻器滑片P移动过程中,要求两电表的示数均不超过所选量程,且灯泡两端的电压不允许超过额定电值的情况下,下列说法正确的是( )(不考虑温度对灯丝电阻的影响)| A. | 电流表示数允许的变化范围为0.3A~0.5A | |
| B. | 滑动变阻器接入电路的阻值允许变化范围为24Ω~60Ω | |
| C. | 灯泡L的电功率允许的变化范围为0.75W~3W | |
| D. | 电路中总功率允许的变化范围为4.5W~6W |
8.研究弹簧测力计的实验错误的是( )
| A. | 加在弹簧测力计上的力不能超出测量范围 | |
| B. | 实验过程中不能用力过猛拉弹簧,以免损坏 | |
| C. | 弹簧测力计下只能挂三只钩码 | |
| D. | 读数时,视线要与刻度线保持水平 |
18.下列说法中不正确的是( )
| A. |  螺丝钉上的螺纹是斜面的应用 | |
| B. |  筷子是费力杠杆 | |
| C. |  利用自制的气压计可以分辨山上和山下大气压的高低 | |
| D. |  台秤是等臂杠杆 |
2.如图所示为实验室常用温度计,下列说法正确的是( )
| A. | 该温度计的分度值为1℃ | |
| B. | 此时温度计的示数为31℃ | |
| C. | 该温度计的量程为20℃-100℃ | |
| D. | 把温度计的内径做粗一些可提高测量的准确程度 |
3. 电动平衡车,又叫体感车,其工作原理是系统以姿态传感器(陀螺仪、加速度计)来监测车身的俯仰状态变化率,通过高速微控制器计算出适当数据和指令后,电动机驱动车前进或后退,同时保持车体平衡,因此,驾驶人只要改变自己身体的角度,往前或后倾,电动平衡车就会根据倾斜的方向前进或后退,而速度则与驾驶人身体倾斜的程度成正比.为避免失控,倾斜角度最大为30度.下表是一种电动平衡车的部分参数:
电动平衡车,又叫体感车,其工作原理是系统以姿态传感器(陀螺仪、加速度计)来监测车身的俯仰状态变化率,通过高速微控制器计算出适当数据和指令后,电动机驱动车前进或后退,同时保持车体平衡,因此,驾驶人只要改变自己身体的角度,往前或后倾,电动平衡车就会根据倾斜的方向前进或后退,而速度则与驾驶人身体倾斜的程度成正比.为避免失控,倾斜角度最大为30度.下表是一种电动平衡车的部分参数:
(1)电动平衡车启动后会将电能主要转化为机械能.
(2)当驾驶人向前倾斜角度增加时,电动平衡将A
A、加速 B、减速 C、停止 D、功率减小
(3)驾驶人向前倾斜角度为30度时,电动平衡车的速度为18km/h.
(4)电动平衡车充满电后,沿平直公路以最高车速正常匀速行驶时,根据表格中的参数可以算出电动平衡车所受的阻力为120N.
电动平衡车,又叫体感车,其工作原理是系统以姿态传感器(陀螺仪、加速度计)来监测车身的俯仰状态变化率,通过高速微控制器计算出适当数据和指令后,电动机驱动车前进或后退,同时保持车体平衡,因此,驾驶人只要改变自己身体的角度,往前或后倾,电动平衡车就会根据倾斜的方向前进或后退,而速度则与驾驶人身体倾斜的程度成正比.为避免失控,倾斜角度最大为30度.下表是一种电动平衡车的部分参数:(1)电动平衡车启动后会将电能主要转化为机械能.
| 动力来源 | 锂电池 | 最高车速 | 18km/h |
| 工作电压 | 60V | 最高车速行驶里程 | 27km |
| 正常工作电流 | 1A | 能量转化效率 | 约90% |
| 最大载重 | 112kg | 固定频率 | 150kHz |
A、加速 B、减速 C、停止 D、功率减小
(3)驾驶人向前倾斜角度为30度时,电动平衡车的速度为18km/h.
(4)电动平衡车充满电后,沿平直公路以最高车速正常匀速行驶时,根据表格中的参数可以算出电动平衡车所受的阻力为120N.