题目内容
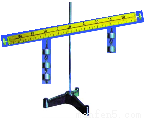
在“研究杠杆平衡条件”的实验中
(1) 实验前,应先调节平衡螺母,使杠杆在 位置平衡,这样做是为了 ;如发现杠杆左端偏低,则可将右端的平衡螺母向 调节,或将左端的平衡螺母向 调节.
(2) 实验时,增减钩码数量并移动挂钩的位置,使杠杆仍在 位置平衡,这样做是为了 ;
(3) 某同学记录了三次实验数据如表:这三次实验数据中有一次是错误的,错误的实验次数是 ,由正确实验结果可得杠杆的平衡条件是 。实验做三次,得到三组数据并进行分析,这样做的目的是_ __。
实验次数 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
1 | 2.0 | 0.04 | 4.0 | 0.02 |
2 | 1.0 | 0.02 | 0.5 | 0.01 |
3 | 2.5 | 0.03 | 1.5 | 0.05 |
(1)水平,消除杠杆自重对实验的影响;右,右; (2)水平,便于测量力臂; (3)第二次,动力×动力臂=阻力×阻力臂,多次测量寻找规律
【解析】
试题分析:(1) 探究杠杆平衡条件时,杠杆自重也要考虑。为了消除杠杆自重对实验的影响,实验前,应先调节平衡螺母,使杠杆在水平位置平衡;实验前,调节杠杆平衡的原则是:“左沉右旋(或右沉左旋)”。如发现杠杆左端偏低,则可将右端的平衡螺母向右调节,或将左端的平衡螺母向右调节.
(2) 实验时,增减钩码数量并移动挂钩的位置,使杠杆仍在水平位置平衡,因为杠杆只有在水平位置平衡时,力与力的作用点的距离才等于力臂。这样做使得实验操作更简单;
(3)这三次实验数据中有一次是错误的,错误的实验次数是第二次,因为1.0×0.02与0.5×0.01不相等;第一次实验结果:2.0×0.04=4.0×0.02,第三次实验结果:2.5×0.03=1.5×0.05,由此可得杠杆的平衡条件是动力×动力臂=阻力×阻力臂。实验的目的是得到普遍的规律,实验做三次,得到三组数据并进行分析,这样做的目的是多次测量寻找规律。
考点:探究:杠杆平衡条件;实验设计


 3 ,电流表A1与A2的示数之比为_______;灯L1两端电压和灯L2两端电压是 (选填“L1”、“L2”或“一样”)大.
3 ,电流表A1与A2的示数之比为_______;灯L1两端电压和灯L2两端电压是 (选填“L1”、“L2”或“一样”)大.