题目内容
1.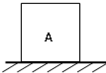 如图所示,边长为0.2m的实心正方体A放置在水平地面上,已知它的密度是2×103kg/m3.求:
如图所示,边长为0.2m的实心正方体A放置在水平地面上,已知它的密度是2×103kg/m3.求:(1)物体A的质量;
(2)物体A对地面的压强.(g取10N/kg)
分析 (1)知道正方体的边长可求体积,根据ρ=$\frac{m}{V}$求出物体A的质量;
(2)物体A对地面的压力和自身的重力相等,根据F=G=mg求出其大小,根据面积公式求出正方体的底面积即为受力面积,利用p=$\frac{F}{S}$求出物体A对地面的压强.
解答 解:(1)正方体A的体积:
V=L3=(0.2m)3=8×10-3m3,
由ρ=$\frac{m}{V}$可得,物体A的质量:
m=ρV=2×103kg/m3×8×10-3m3=16kg;
(2)物体A对地面的压力:
F=G=mg=16kg×10N/kg=160N,
受力面积:
S=L2=(0.2m)2=4×10-2m2,
物体A对地面的压强:
p=$\frac{F}{S}$=$\frac{160N}{4×1{0}^{-2}{m}^{2}}$=4×103Pa.
答:(1)物体A的质量为16kg;
(2)物体A对地面的压强为4×103Pa.
点评 本题考查了质量和压强的计算,关键是知道水平面上物体的压力和自身的重力相等.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
11.下列关于电阻的说法中,正确的是( )
| A. | 一切材料的电阻都随着温度的升高而增大 | |
| B. | 在同一温度下长度和横截面积均相同的铜导线和保险丝,保险丝的电阻大 | |
| C. | 滑动变阻器是通过改变连入电路中的电阻线的横截面积的大小来改变电阻的 | |
| D. | 当导体的电流为零时,导体的电阻也为零 |
9.小明和小红利用如图甲装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件: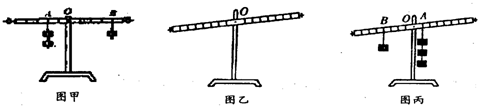
(1)如图乙,为使杠杆在水平位置平衡,应将左端的平衡螺母向右(选填“左”或“右”)移动,将杠杆调整在水平位置的目的是为了方便测量力臂大小;
(2)小明在实验中记录了三次实验数据如下表:这三次实验数据中有一次是错误的,错误数据的实验次数是1,由正确实验结果可得杠杆的平衡条件是F1L1=F2L2;
(3)小红调节好平衡后,在杠杆两端挂上钩码,杠杆的状态如图丙所示,为此,小红又调节两端的平衡螺母,使杠杆重新回到水平平衡位置,然后正确记录下钩码重、动力臂OA和阻力臂OB的值,分析实验数据后发现得不到教材中的“杠杆的平衡条件”,小红的哪一步操作导致了实验结果与教材中的结论不一致?答:杠杆上挂钩码后,小红又调节了平衡螺母;
(4)有同学用现有实验方案得到如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,这个结论与杠杆的平衡条件不符,原因是实验过程中B.
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性.
(1)如图乙,为使杠杆在水平位置平衡,应将左端的平衡螺母向右(选填“左”或“右”)移动,将杠杆调整在水平位置的目的是为了方便测量力臂大小;
(2)小明在实验中记录了三次实验数据如下表:这三次实验数据中有一次是错误的,错误数据的实验次数是1,由正确实验结果可得杠杆的平衡条件是F1L1=F2L2;
| 次数/实验 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.0 | 10 | 0.5 | 15 |
| 2 | 2.0 | 10 | 1.0 | 20 |
| 3 | 2.0 | 20 | 4.0 | 10 |
(4)有同学用现有实验方案得到如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,这个结论与杠杆的平衡条件不符,原因是实验过程中B.
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性.
 如图所示是蹦极运动的简化示意图,弹性绳一端固定在O点,另一端系住运动员,运动员从O点自由下落,到A点处弹性绳自然伸直.B点是弹性绳对运动员的拉力等于其重力的点,C点是蹦极运动员到达的最低点(忽略空气阻力),则从O点到C点的过程中运动员的重力势能一直在减小,在B(填“A”或“B”或“C)点处运动员的动能最大,从A点运动到C点运动员的机械能减小(填“增大”或“减小”或“不变”).
如图所示是蹦极运动的简化示意图,弹性绳一端固定在O点,另一端系住运动员,运动员从O点自由下落,到A点处弹性绳自然伸直.B点是弹性绳对运动员的拉力等于其重力的点,C点是蹦极运动员到达的最低点(忽略空气阻力),则从O点到C点的过程中运动员的重力势能一直在减小,在B(填“A”或“B”或“C)点处运动员的动能最大,从A点运动到C点运动员的机械能减小(填“增大”或“减小”或“不变”).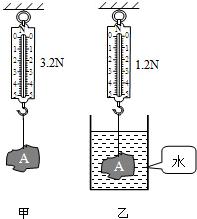 小刚利用弹簧测力计、细线、玻璃杯和水,测出了石块A的密度,他设计了如图所示的实验方案,并按顺序完成了甲、乙实验操作,根据图中内容,求:(g取10N/kg)
小刚利用弹簧测力计、细线、玻璃杯和水,测出了石块A的密度,他设计了如图所示的实验方案,并按顺序完成了甲、乙实验操作,根据图中内容,求:(g取10N/kg)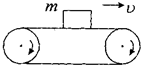 传送带上有一个物体m,当它在如图所示位置时,它与传送带一起以1m/s的速度在水平方向上匀速运动.空气阻力不计.请在图中画出m受力情况的示意图.
传送带上有一个物体m,当它在如图所示位置时,它与传送带一起以1m/s的速度在水平方向上匀速运动.空气阻力不计.请在图中画出m受力情况的示意图.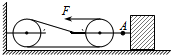 如图所示,在30N的水平拉力F作用下,重300N的物体沿水平地面向左做匀速直线运动,物体与地面间的滑动摩擦力为72N,则绳子A点承受的拉力为72N,滑轮组的机械效率为80%.
如图所示,在30N的水平拉力F作用下,重300N的物体沿水平地面向左做匀速直线运动,物体与地面间的滑动摩擦力为72N,则绳子A点承受的拉力为72N,滑轮组的机械效率为80%.
11.如图所示的四个电路中,两灯泡属于串联接法的是( )
| A. | 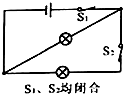 | B. | 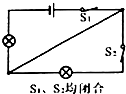 | C. | 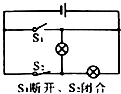 | D. | 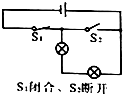 |