题目内容
16. “擦窗机器人”的质量为2kg,它的“腹部”有吸盘,当擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.(g取10N/kg)
“擦窗机器人”的质量为2kg,它的“腹部”有吸盘,当擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.(g取10N/kg)(1)当擦窗机器人在竖直玻璃上静止时,若真空泵继续抽气,则擦窗机器人受到的摩擦力不变(选填“变大”、“变小”或“不变”).
(2)吸盘与玻璃的接触面积为1.2×103m2,如吸盘在此面积上对玻璃的压强为1.5×105Pa,则吸盘在此面积上对玻璃的压强为1.5×105Pa,则吸盘对玻璃的压力是多大?
(3)擦窗机器人以0.1m/s的速度匀速竖直向下运动8s,它所受重力做的功是多少?重力做功的功率是多大?
分析 (1)物体静止时处于平衡状态,受到的力为平衡力;
(2)知道吸盘与玻璃的接触面积即受力面积和吸盘在此面积上对玻璃的压强,根据F=pS求出吸盘对玻璃的压力;
(3)根据速度公式求出机器人匀速向下运动的距离,根据W=Gh=mgh求出所受重力做的功,根据P=$\frac{W}{t}$求出重力做功的功率.
解答 解:(1)擦窗机器人在竖直玻璃板上静止时,处于平衡状态,竖直方向受到的重力和摩擦力是一对平衡力,二力大小相等,当真空泵继续向外抽气时,机器人的重力不变,则擦窗机器人受到的摩擦力不变;
(2)由p=$\frac{F}{S}$可得,吸盘对玻璃的压力:
F=pS=1.5×105Pa×1.2×10-3m2=180N;
(3)由v=$\frac{s}{t}$可得,机器人匀速向下运动的距离:
h=vt=0.1m/s×8s=0.8m,
所受重力做的功:
W=Gh=mgh=2kg×10N/kg×0.8m=16J,
重力做功的功率:
P=$\frac{W}{t}$=$\frac{16J}{8s}$=2W.
答:(1)不变;
(2)吸盘对玻璃的压力是180N;
(3)所受重力做的功是16J,重力做功的功率是2W.
点评 本题考查了二力平衡条件和压强公式、功率公式的应用,根据物体在平衡状态下受平衡力找出平衡力是解题关键.

练习册系列答案
相关题目
6. 在不计绳重和摩擦的情况下,小明利用两个滑轮组成滑轮组匀速提升物体.下表是在利用该滑轮组将一物体匀速提升到一定高度时采集到的信息.
在不计绳重和摩擦的情况下,小明利用两个滑轮组成滑轮组匀速提升物体.下表是在利用该滑轮组将一物体匀速提升到一定高度时采集到的信息.
(1)通过计算确定该滑轮组提起物体的绳子段数,并在右边虚线框中画出该滑轮组的组装示意图.
(2)该滑轮组的机械效率多少?
(3)用该滑轮组将重为800N的物体匀速提升1m时,共用时5s,拉力的功率为多少W?
在不计绳重和摩擦的情况下,小明利用两个滑轮组成滑轮组匀速提升物体.下表是在利用该滑轮组将一物体匀速提升到一定高度时采集到的信息.| 物体所受重力 G/N | 作用在绳子自由端的拉力F/N | 滑轮组做的有用功 W有用/J | 拉力做的总功 W总/J |
| 500 | 200 | 1000 | 1200 |
(2)该滑轮组的机械效率多少?
(3)用该滑轮组将重为800N的物体匀速提升1m时,共用时5s,拉力的功率为多少W?
7.一同学用“可乐瓶”做小孔成像实验,实验装置如图(甲图)所示.
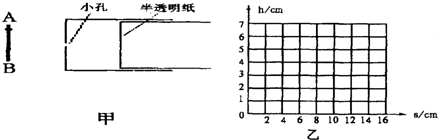
(1)请在甲图中的半透明纸上画出蜡烛AB的像A′B′.
(2)该同学发现蜡烛和小孔的位置固定后,像离小孔越远,像就越大.他测出了不同距离时的像的高度(见下表).请根据表中的数据,在乙图中的坐标中画出h与S的关系图象.
(3)从图象中看出h与S是什么关系?h与s成正比关系
(1)请在甲图中的半透明纸上画出蜡烛AB的像A′B′.
(2)该同学发现蜡烛和小孔的位置固定后,像离小孔越远,像就越大.他测出了不同距离时的像的高度(见下表).请根据表中的数据,在乙图中的坐标中画出h与S的关系图象.
(3)从图象中看出h与S是什么关系?h与s成正比关系
| 像到小孔的距离s/cm | 2.0 | 3.6 | 6.0 | 8.0 | 10.0 | 12.4 | 14.0 |
| 像的高度h/cm | 1.0 | 2.2 | 3.0 | 4.0 | 5.0 | 5.8 | 7.0 |


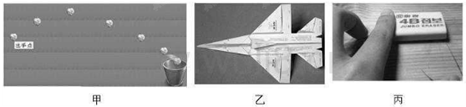
 如图所示,这棵人造风力发电树可以将碎片化的风力资源化零为整,它的外形就像一棵挂满大绿叶的大树,这些“大树叶”是72个竖向风轮机,只要风速超过2m/s,风轮机就会转动从而产生电流,为周围的路灯提供电力.一棵树一年下来可发电约3.2kW•h.风轮机转动时将机械能转化为电能,这棵发电树一年的发电量可供一只额定功率为8W的节能灯正常工作400h.
如图所示,这棵人造风力发电树可以将碎片化的风力资源化零为整,它的外形就像一棵挂满大绿叶的大树,这些“大树叶”是72个竖向风轮机,只要风速超过2m/s,风轮机就会转动从而产生电流,为周围的路灯提供电力.一棵树一年下来可发电约3.2kW•h.风轮机转动时将机械能转化为电能,这棵发电树一年的发电量可供一只额定功率为8W的节能灯正常工作400h.
8.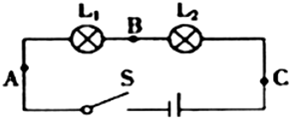 如图是“探究串联电路中各处电流的关系”的实验电路图:
如图是“探究串联电路中各处电流的关系”的实验电路图:
(1)实验中,选择两个小灯泡的规格应该是不相同的(填“相同”或“不相同”).
(2)下表是某同学实验中的一组数据:
指出上述表格所记录的数据中,明显错误的数值是1.5A,造成错误的原因是在读数时,把电流表把电流表0~0.6A量程当做0~3A量程了.
(3)实验中某同学发现两个串联的小灯泡中,L1发光,L2不发光,造成其灯泡L2不发光的原因是C.
A.通过灯泡L2的电流小 B.灯泡L2的灯丝断了
C.灯泡L2的规格与灯泡L1的规格不一样 D.小灯泡L2靠近负极.
如图是“探究串联电路中各处电流的关系”的实验电路图:(1)实验中,选择两个小灯泡的规格应该是不相同的(填“相同”或“不相同”).
(2)下表是某同学实验中的一组数据:
| 电流表的位置 | A | B | C |
| 电流I/A | 0.3 | 0.3 | 1.5 |
(3)实验中某同学发现两个串联的小灯泡中,L1发光,L2不发光,造成其灯泡L2不发光的原因是C.
A.通过灯泡L2的电流小 B.灯泡L2的灯丝断了
C.灯泡L2的规格与灯泡L1的规格不一样 D.小灯泡L2靠近负极.
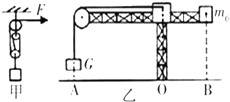 如图乙所示是一种起重机的简图,为了保证起重机起重时不会翻到,在起重机右边配有一个重物m0;已知OA=12m,OB=4m.用它把质量为2×103kg,底面积为0.5m2的货物G匀速提起.求:
如图乙所示是一种起重机的简图,为了保证起重机起重时不会翻到,在起重机右边配有一个重物m0;已知OA=12m,OB=4m.用它把质量为2×103kg,底面积为0.5m2的货物G匀速提起.求: