题目内容
9. 为了测量电路图中通过灯泡L1的电流,电流表应该接在如图中的哪一个位置
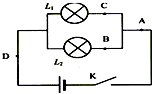
为了测量电路图中通过灯泡L1的电流,电流表应该接在如图中的哪一个位置( )
| A. | 在A点 | B. | 在B点 | C. | 在C点 | D. | 在D点 |
分析 电流表的正确使用方法:电流表和被测量的用电器串联;让电流从“+”接线柱流入,从“-”接线柱流出;不能超出电流表的最大量程;绝对不允许不经过用电器而直接把电流表连在电源的两极上.
解答 解:要想测量L1的电流,就应该把电流表和L1串联在电路中.
A、在A处时,电流表是串联在干路上,测的是总电流,故A错误;
B、在B处时,电流表和L2串联,测的是L2中的电流,故B错误;
C、在C处时,电流表和L1串联,测的是L1中的电流,故C正确;
D、在D处时,电流表是串联在干路上,测的是总电流,故D错误.
故选C
点评 此题考查的是电流表的正确使用方法:电流表要测量哪个电灯的电流就要与哪个电灯串联.

练习册系列答案
 挑战100单元检测试卷系列答案
挑战100单元检测试卷系列答案 名题金卷系列答案
名题金卷系列答案
相关题目
19.为了研究拉力做功的快慢,某同学设计了如下的实验进行研究.他把不同质量的物体匀速提升不同的高度,同时测出相应的所用时间,记录的实验数据如表所示.已知表一所示实验拉力做功最快,表三所示实验做功最慢.每一表格所示实验做功快慢相同.
表1
表2
表3
(1)分析比较实验次数1、4、7,可得出的初步结论是:在时间相同的情况下,拉力所做功越多,做功就越快.
(2)分析比较实验次数1、5、9(或2、6,或4、8),可得出的初步结论是:在做相同功的情况下,时间越短,做功越快.
(3)请进一步综合分析比较表一、表二、表三中的数据及相关条件,并归纳得出结论.
(a)分析比较表一、表二或表三中的数据及所给已知条件,可初步得出:拉力做功与所用时间的比值相同,拉力做功快慢相同.
(b)分析比较表一、表二和表三中的数据及所给已知条件,可初步得出:
拉力做功与所用时间的比值越大,拉力做功越快.由此可见,物体的做功快慢取决于物体拉力做功与所用时间的比值,为此物理学引入了功率这一物理量.
表1
| 实验序号 | 拉力(牛) | 提升高度(米) | 功(焦) | 所用时间(秒) |
| 1 | 25 | 0.80 | 20 | 2 |
| 2 | 60 | 0.50 | 30 | 3 |
| 3 | 200 | 0.20 | 40 | 4 |
| 实验序号 | 拉力(牛) | 提升高度(米) | 功(焦) | 所用时间(秒) |
| 4 | 50 | 0.20 | 10 | 2 |
| 5 | 80 | 0.25 | 20 | 4 |
| 6 | 100 | 0.30 | 30 | 6 |
| 实验序号 | 拉力(牛) | 提升高度(米) | 功(焦) | 所用时间(秒) |
| 7 | 10 | 0.50 | 5 | 2 |
| 8 | 40 | 0.25 | 10 | 4 |
| 9 | 100 | 0.20 | 20 | 8 |
(2)分析比较实验次数1、5、9(或2、6,或4、8),可得出的初步结论是:在做相同功的情况下,时间越短,做功越快.
(3)请进一步综合分析比较表一、表二、表三中的数据及相关条件,并归纳得出结论.
(a)分析比较表一、表二或表三中的数据及所给已知条件,可初步得出:拉力做功与所用时间的比值相同,拉力做功快慢相同.
(b)分析比较表一、表二和表三中的数据及所给已知条件,可初步得出:
拉力做功与所用时间的比值越大,拉力做功越快.由此可见,物体的做功快慢取决于物体拉力做功与所用时间的比值,为此物理学引入了功率这一物理量.
20.有一个实心球形物体,用弹簧测力计在空气中称重时,测力计的示数为12N;当把物体一半体积浸入水中时,测力计的示数为5N.把物体从弹簧测力计上取下投入水中,静止时物体物体在水中( )
| A. | 沉入水底 | B. | 漂浮在水面 | C. | 悬浮在水中 | D. | 以上三者都可能 |

4.一个空心金属球,重6N,体积是6×10-4m3,(g取10N/kg)将此金属球投入水待静止时,此球将( )
| A. | 漂浮在水中且部分露出水面 | B. | 沉入水底 | ||
| C. | 可以在任何深度悬浮 | D. | 以上三种情况都可能 |
14.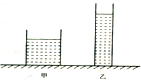 如图,不计容器的重量,甲、乙两个圆柱形容器中装有质量相同的同种液体,则甲、乙两容器内底部的压强与容器对桌面的压力的大小比较为( )
如图,不计容器的重量,甲、乙两个圆柱形容器中装有质量相同的同种液体,则甲、乙两容器内底部的压强与容器对桌面的压力的大小比较为( )
如图,不计容器的重量,甲、乙两个圆柱形容器中装有质量相同的同种液体,则甲、乙两容器内底部的压强与容器对桌面的压力的大小比较为( )| A. | P甲>P乙,F甲>F乙 | B. | P甲=P乙,F甲>F乙 | C. | P甲<P乙,F甲=F乙 | D. | P甲=P乙,F甲<F乙 |
1.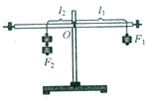 小明用如图所示的实验装置探究杠杆的平衡条件.
小明用如图所示的实验装置探究杠杆的平衡条件.
(1)为了方便测量力臂,应将杠杆调至水平位置平衡.调节时若杠杆右端稍低,可只将右端的平衡螺母向左调节.
(2)小明调节杠杆平衡后,通过加挂钩码分别改变F1和F2,并测出对应的力臂l1和l2,记录了如表中所示的实验数据.小明得出杠杆的平衡条件是:“动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离“.小红认为小明的结论不正确,为了验证自己的观点,小红将图中的F1改用弹簧测力计来拉,实验时改变拉力的方向,仍使杠杆在水平位置平衡,比较拉力的大小,即可证明小红的判断是否正确.
小明用如图所示的实验装置探究杠杆的平衡条件.| 次数 | F1/N | l1/cm | F2/N | l2/cm |
| 1 | 1 | 8 | 2 | 4 |
| 2 | 2 | 8 | 1 | 16 |
| 3 | 2 | 12 | 3 | 8 |
(2)小明调节杠杆平衡后,通过加挂钩码分别改变F1和F2,并测出对应的力臂l1和l2,记录了如表中所示的实验数据.小明得出杠杆的平衡条件是:“动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离“.小红认为小明的结论不正确,为了验证自己的观点,小红将图中的F1改用弹簧测力计来拉,实验时改变拉力的方向,仍使杠杆在水平位置平衡,比较拉力的大小,即可证明小红的判断是否正确.
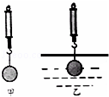 如图(甲)所示,弹簧测力计示数为5N.如图(乙)所示,小球完全浸没在水中,测力计示数为2N.则小球受到的浮力为3N,小球的体积为3×10-4m3.剪断悬吊小球的细线,小球在水中稳定时受到的浮力为3N.(g取10N/kg)
如图(甲)所示,弹簧测力计示数为5N.如图(乙)所示,小球完全浸没在水中,测力计示数为2N.则小球受到的浮力为3N,小球的体积为3×10-4m3.剪断悬吊小球的细线,小球在水中稳定时受到的浮力为3N.(g取10N/kg)