题目内容
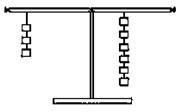
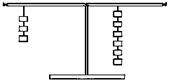
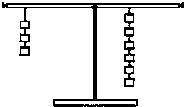 在验证杠杆平衡条件时,某实验小组得到了如图所示的杠杆平衡状态.已知每个钩码的质量均相等:
在验证杠杆平衡条件时,某实验小组得到了如图所示的杠杆平衡状态.已知每个钩码的质量均相等:
(1)实验前应调节 ________,使杠杆在 ________位置平衡,这样做的目的是 ________.实验过程中,为了使杠杆保持平衡,________(填“可以”或“不可以”)再使用上述调节的元件.
(2)若钩码所挂位置不动,将左边的钩码去掉一个,为使杠杆仍然保持平衡,右边的钩码该拿掉 ________个.
(3)由此,总结出杠杆的平衡条件为:________.
(4)若两端钩码分别向内移动相同的距离,则杠杆 ________(填“左”或“右”)端下沉.
解:
(1)实验前应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的目的是便于测量力臂,实验过程中,为了使杠杆保持平衡,不可以再使用上述调节的元件;
(2)根据杠杆的平衡条件:F1L1=F2L2得3G?L1=6G?L2,即: ;
;
当左侧去掉一个钩码时,力与力臂的乘积为:2G?L1=2G?2L2;
为了杠杆平衡,右侧必须去掉两个钩码;
(3)杠杆平衡条件是:动力×动力臂=阻力×阻力臂,即:F1L1=F2L2或者 ;
;
(4)设两端钩码均向内移动距离L,
则杠杆左侧为:3G×(L1-L)=3G?L1-3G?L;
右侧为:6G×(L2-L)=6G?L2-6GL;
从上面两式看出:右侧减去的数值大,杠杆原来:3G?L1=6G?L2;
所以杠杆左端下沉.
故答案为:
平衡螺母;水平位置;便于测量力臂;不可以;2;动力×动力臂=阻力×阻力臂,即:F1L1=F2L2或者 ;左.
;左.
分析:(1)杠杆平衡是指杠杆保持静止不动或匀速转动的状态;
杠杆可以在任意位置保持平衡但是为了便于测量力臂,最好是在水平位置保持平衡;
在使用杠杆的过程中为了使杠杆平衡不可以再调平衡螺母,可以通过改变力与力臂来调节;
(2)杠杆平衡条件是:动力×动力臂=阻力×阻力臂,即:F1L1=F2L2或者,根据杠杆平衡条件计算去掉钩码的个数;
(3)设两端钩码均向内移动距离L,计算杠杆左侧力与力臂的乘积与杠杆右侧力与力臂的乘积,然后比较大小判断杠杆向哪侧偏.计算杠杆左侧为:3G×(L1-L)=3G?L1-3G?L;右侧为:6G×(L2-L)=6G?L2-6GL.
点评:考查杠杆的平衡条件及应用,对于已经平衡的杠杆,改变条件后判断杠杆是否还能保持平衡,有两种方法:一是按力和力臂的乘积;二是按比例的方法.
(1)实验前应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的目的是便于测量力臂,实验过程中,为了使杠杆保持平衡,不可以再使用上述调节的元件;
(2)根据杠杆的平衡条件:F1L1=F2L2得3G?L1=6G?L2,即:
;当左侧去掉一个钩码时,力与力臂的乘积为:2G?L1=2G?2L2;
为了杠杆平衡,右侧必须去掉两个钩码;
(3)杠杆平衡条件是:动力×动力臂=阻力×阻力臂,即:F1L1=F2L2或者
;(4)设两端钩码均向内移动距离L,
则杠杆左侧为:3G×(L1-L)=3G?L1-3G?L;
右侧为:6G×(L2-L)=6G?L2-6GL;
从上面两式看出:右侧减去的数值大,杠杆原来:3G?L1=6G?L2;
所以杠杆左端下沉.
故答案为:
平衡螺母;水平位置;便于测量力臂;不可以;2;动力×动力臂=阻力×阻力臂,即:F1L1=F2L2或者
;左.分析:(1)杠杆平衡是指杠杆保持静止不动或匀速转动的状态;
杠杆可以在任意位置保持平衡但是为了便于测量力臂,最好是在水平位置保持平衡;
在使用杠杆的过程中为了使杠杆平衡不可以再调平衡螺母,可以通过改变力与力臂来调节;
(2)杠杆平衡条件是:动力×动力臂=阻力×阻力臂,即:F1L1=F2L2或者
,根据杠杆平衡条件计算去掉钩码的个数;(3)设两端钩码均向内移动距离L,计算杠杆左侧力与力臂的乘积与杠杆右侧力与力臂的乘积,然后比较大小判断杠杆向哪侧偏.计算杠杆左侧为:3G×(L1-L)=3G?L1-3G?L;右侧为:6G×(L2-L)=6G?L2-6GL.
点评:考查杠杆的平衡条件及应用,对于已经平衡的杠杆,改变条件后判断杠杆是否还能保持平衡,有两种方法:一是按力和力臂的乘积;二是按比例的方法.

练习册系列答案
 培优三好生系列答案
培优三好生系列答案
相关题目
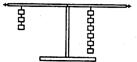 在验证杠杆平衡条件时,某实验小组得到了如右图所示的杠杆平衡状态,已知每个钩码的质量均相等:
在验证杠杆平衡条件时,某实验小组得到了如右图所示的杠杆平衡状态,已知每个钩码的质量均相等:
 在验证杠杆平衡条件时,某实验小组得到了如图所示的杠杆平衡状态.已知每个钩码的质量均相等:
在验证杠杆平衡条件时,某实验小组得到了如图所示的杠杆平衡状态.已知每个钩码的质量均相等: