题目内容
9.在探究杠杆的平衡条件时,同学们联想玩跷跷板的游戏,决定要研究动力对杠杆平衡的影响.他们将一个玩具固定在杠杆一端的B点作为阻力,且保持阻力的大小、方向、作用点都不变,在杠杆的另一端用力使杠杆在水平位置平衡,并用弹簧测力计测出动力的大小.实验中,甲小组每次都保持动力在竖直方向、只改变动力作用点的位置,分别如图(a)中的F1、F2、F3所示;乙小组每次都保持动力作用点的位置不变、改变动力的方向(“动力的方向”用OA连线跟动力方向的夹角θ表示,且0°<θ≤90°),分别如图(b)中的F4、F5、F6所示;表一、表二是两小组同学记录的实验数据.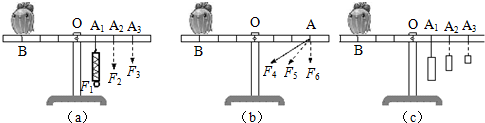
| 表一 甲小组 | 表二 乙小组 | ||||||
| 实验 序号 | 支点到动力 作用点的距 离S (厘米) | 动力的方 向(夹角θ) | 动力的 大小(牛) | 实验 序号 | 支点到动力 作用点的距 离S (厘米) | 动力的方 向(夹角θ) | 动力的 大小(牛) |
| 1 | 5 | 90° | 6 | 4 | 15 | 30° | 4 |
| 2 | 10 | 90° | 3 | 5 | 15 | 45° | 2.8 |
| 3 | 15 | 90° | 2 | 6 | 15 | 90° | 2 |
(2)迸一步综合分析表一与表二中的实验数据及相关条件,可得出的初步结论是:作用在杠杆一端的阻力不变时,下列因素的改变一定会影响杠杆平衡的是AD(填字母):
A.动力的大小 B.支点到动力作用点的距离
C.动刀的方向 D.支点到动力作用线的距离
(3)小华按照甲组同学的实验方法,拉力作用点与原来相同(还是A1、A2、A3),把原来用弹簧测力计拉改为挂钩码的方法做了上述实验,如图(C)所示.但发现每组钩码的重力都比甲组同学用弹簧秤测得的数据要大,且弹簧秤读数准确无误,请你帮助分析造成两者读数不同的主要原因是什么?甲组同学没有考虑到弹簧测力计的外壳受到的重力.
分析 (1)控制阻力不变,动力方向不变(θ=90°),比较表一中第二列和第四列的实验数据得出支点到动力作用点的距离S与动力的关系;
(2)综合分析表一与表二中的实验数据及相关条件可得出:作用在杠杆一端的阻力不变时,影响杠杆平衡的因素;
(3)在探究杠杆平衡条件时,应考虑弹簧测力计的外壳的重力对实验的影响.
解答 解:(1)研究表一中第二列与第四列实验数据,即比较支点到动力作用点的距离S和动力的大小可知,当阻力不变时,杠杆平衡时动力的大小与支点到动力作用点之间的关系,
且在动力方向不变(θ=90°)的情况下,支点到动力作用点的距离S越大,动力越小;
(3)综合分析表一与表二中的实验数据及相关条件,我们可以得到:影响杠杆平衡时拉力的大小与动力的大小、支点到动力作用线的距离有关;
(3)甲组同学在实验时用弹簧测力计拉,没有考虑到弹簧测力计的外壳受到的重力,因此,把用弹簧测力计拉改为挂钩码做了上述实验,每组数据都比甲组同学测得的数据要大.
故答案为:(1)动力作用点的距离;(2)AD;(3)甲组同学没有考虑到弹簧测力计的外壳受到的重力;
点评 控制变量法是初中物理中常用的探索问题和分析解决问题的科学方法之一.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
 吐鲁番是全国有名的“火炉”常年高温少雨,水贵如油,当地流行使用坎儿井,大大减少了输水过程中水的蒸发和渗漏.坎儿井由明渠、暗渠、竖井组成(如图).暗渠即地下水道,是坎儿井的主体,宽约1.2m.井的深度因地势和地下水位高低不同而有深有浅,一般是越靠近源头,竖井就越深,最深的井可达90m以上,井内的水在夏季约比外界低5-10℃.请你分析一下坎儿井是如何减少水的蒸发的.
吐鲁番是全国有名的“火炉”常年高温少雨,水贵如油,当地流行使用坎儿井,大大减少了输水过程中水的蒸发和渗漏.坎儿井由明渠、暗渠、竖井组成(如图).暗渠即地下水道,是坎儿井的主体,宽约1.2m.井的深度因地势和地下水位高低不同而有深有浅,一般是越靠近源头,竖井就越深,最深的井可达90m以上,井内的水在夏季约比外界低5-10℃.请你分析一下坎儿井是如何减少水的蒸发的.
 木块用细绳系于水中保持静止,如图所示.已知木块重量是6牛,细绳的拉力为2牛,当剪断细绳后,在木块上浮过程中,木块受到的最大浮力是( )
木块用细绳系于水中保持静止,如图所示.已知木块重量是6牛,细绳的拉力为2牛,当剪断细绳后,在木块上浮过程中,木块受到的最大浮力是( )
4.请分析,在月球上,下列哪种活动是不可以实现的( )
| A. | 利用激光进行远程测距 | B. | 利用声波进行远程测距 | ||
| C. | 利用天平测物体质量 | D. | 利用弹簧秤测物体重力 |
 如图所示是我国设计的北京2008年奥运会奖牌,奖牌正面为国际奥委会统一规定的图案,奖牌背面镶嵌着取自中国的玉石,形象诠释了中华民族自古以来以“玉”比“德”的价值观,是中华文明与奥林匹克精神的一次“中西合璧”. 奖牌分为金牌、银牌和铜牌.其中金牌由纯银、玉石、纯金组成,金牌的总体积约为22.7cm3,镶嵌玉石的体积约为5.4cm3,纯金的质量约为6g.(已知:ρ玉=3.0g/cm3,ρ金=19.3g/cm3,ρ银=10.0g/cm3).请问:
如图所示是我国设计的北京2008年奥运会奖牌,奖牌正面为国际奥委会统一规定的图案,奖牌背面镶嵌着取自中国的玉石,形象诠释了中华民族自古以来以“玉”比“德”的价值观,是中华文明与奥林匹克精神的一次“中西合璧”. 奖牌分为金牌、银牌和铜牌.其中金牌由纯银、玉石、纯金组成,金牌的总体积约为22.7cm3,镶嵌玉石的体积约为5.4cm3,纯金的质量约为6g.(已知:ρ玉=3.0g/cm3,ρ金=19.3g/cm3,ρ银=10.0g/cm3).请问:
18.下列说法中正确的是( )
| A. | 光线垂直照射在平面镜上,入射角是90° | |
| B. | 漫反射也遵守反射定律 | |
| C. | 反射光线跟入射光线的夹角为120°,则入射角为60° | |
| D. | 镜面反射遵守光的反射定律,漫反射不遵守光的反射定律 |
19.把标有“3V 1W”字样的灯泡L1和标有“6V 1W”字样的灯泡L2串联后接在电压恒为7.5V的电源上,下列说法正确的是( )
| A. | 两灯都能正常发光 | B. | 两灯都不能正常发光 | ||
| C. | 灯泡能L1正常发光 | D. | 灯泡L2能正常发光 |