题目内容
1.我国自主研发的长航程极地漫游机器人.机器人质量约500kg,装有四条三角形履带,2013年2月,首次在南极内陆冰盖完成了27km的自主行走.求:(1)该机器人所受到的重力是多少?
(2)本次自主行走共耗时0.5h,则它的平均速度为多少?
分析 (1)知道机器人的质量,利用G=mg求出机器人的重力;
(2)利用v=$\frac{s}{t}$求出它的平均速度;
解答 解:
(1)机器人的重力:
G=mg=500kg×10N/kg=5000N;
(2)由题知,路程s=27km,时间t=0.5h,
则机器人的平均速度:
v=$\frac{s}{t}$=$\frac{27km}{0.5h}$=54km/h.
答:(1)该机器人所受到的重力是5000N;
(2)本次自主行走共耗时0.5h,则它的平均速度为54km/h.
点评 本题考查了重力公式、速度公式的应用,属于基础题目.

练习册系列答案
相关题目
11.小明同学在做“测定小灯泡的功率”实验时,选取了一个标有“2.5V”的小灯泡和必要的器材.小明没有连接完整的实物电路如图.

(1)请你用笔画线代替导线,将实物电路连接完整.
(2)电路连线后,小明连续进行4次实验,有关数据和现象填写在表格里.
①电路中使用滑动变阻器的目的是保护电路;改变灯的电压和通过的电流.
②连接好电路后,将滑片P移到A端(选填A或B),闭合开关后,无论怎样移动滑片,发现电流表无示数,电压表有示数,故障的原因可能是灯泡断路
③检查无误后,第一次实验时,电流表的指针的位置如图所示,请你将它填写到表格中的空格中.
④小灯泡的额定功率是1.0W.
⑤从表格中的数据可知,灯丝的电阻随两端电压的增加而变大(变大/变小),电阻变化的本质是灯丝的电阻随温度的升高而增大.
(1)请你用笔画线代替导线,将实物电路连接完整.
| 次数 | 电压U/V | 电流I/A | 灯泡亮度 |
| 1 | 1.5 | 0.32 | 灯光微弱 |
| 2 | 2.2 | 0.38 | 较暗 |
| 3 | 2.5 | 0.40 | 正常发光 |
| 4 | 3.0 | 0.45 | 很亮 |
①电路中使用滑动变阻器的目的是保护电路;改变灯的电压和通过的电流.
②连接好电路后,将滑片P移到A端(选填A或B),闭合开关后,无论怎样移动滑片,发现电流表无示数,电压表有示数,故障的原因可能是灯泡断路
③检查无误后,第一次实验时,电流表的指针的位置如图所示,请你将它填写到表格中的空格中.
④小灯泡的额定功率是1.0W.
⑤从表格中的数据可知,灯丝的电阻随两端电压的增加而变大(变大/变小),电阻变化的本质是灯丝的电阻随温度的升高而增大.
12.下列说法中正确的是( )
| A. | 太阳能热水器将光能转化为内能 | |
| B. | 物体的内能是物体的动能和势能的总和 | |
| C. | 世界上存在的电荷只有两种 | |
| D. | 随着人类科学技术的不断进步,总有一天永动机可能被制造出来 |
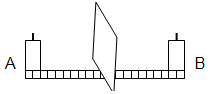 如图所示,某同学在做探究平面镜成像特点的实验时,将一块玻璃板竖直架在一把直尺的上面,再取两段等长的蜡烛A、B,一前一后竖直放在直尺上,实验过程中眼睛始终在蜡烛A的一侧进行观察.
如图所示,某同学在做探究平面镜成像特点的实验时,将一块玻璃板竖直架在一把直尺的上面,再取两段等长的蜡烛A、B,一前一后竖直放在直尺上,实验过程中眼睛始终在蜡烛A的一侧进行观察. (1)如图甲,滴入热水中的墨水比滴入冷水中的墨水扩散得快,说明温度越高分子运动越剧烈.
(1)如图甲,滴入热水中的墨水比滴入冷水中的墨水扩散得快,说明温度越高分子运动越剧烈.
13.在如图甲所示的电路中,闭合开关S后,两个灯泡都能发光,电流表A1A2的指针均在图乙所示的位置,则下列说法中正确的是( )
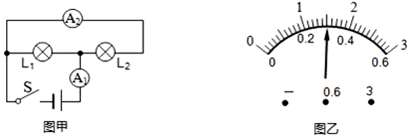
| A. | 电流表A1的示数是1.5A | B. | 通过灯L1、L2的电流都为0.3A | ||
| C. | 通过灯L2的电流为1.2A | D. | 电路的总电流为1.8A |
11.如图所示的电路中,R1=6欧,R2=12欧.当开关S闭合后,Al、A2的读数之比为( )

| A. | 3:1 | B. | 2:3 | C. | 1:3 | D. | 2:1 |