题目内容
18.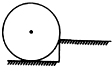 如图所示,张师傅想用最省力的方法把一个油桶推上台阶,请你在图中作出:
如图所示,张师傅想用最省力的方法把一个油桶推上台阶,请你在图中作出:(1)杠杆的支点;
(2)最省力的力臂;
(3)最小力的方向.
分析 由杠杆的平衡条件可知:当阻力、阻力臂一定时,动力臂越大,则动力越小;因此解答此题,只需找出使动力臂最大的动力作用点,然后作动力臂的垂线即可.
解答 解:由杠杆的平衡条件可知,在阻力乘阻力臂不变时,动力臂越长所用的动力越小;
如图,支点为O,过支点O做直径OA,过A做OA的垂线,可得动力的作用线,按这个方向用力,动力臂最长,最省力,如图所示: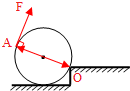
点评 在处理此类杠杆中最小力的问题时,可按以下步骤进行:①确定支点和动力作用点;②过动力作用点做出与动力臂垂直的直线,即动力作用线.

练习册系列答案
 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案
相关题目
8. 如图所示,是小明家最近买的一台红色智能扫地机器人,是智能家用电器的一种,能自动完成房间内地板清理工作.它充好电后可以通过红外感应,识别地板上垃圾、辨别前方障碍物;并通过电动机的高速旋转,在主机内形成真空,利用由此产生的高速气流,从吸入口吸进垃圾,清扫完毕后能自动回到充电器进行充电.关于扫地机器人的说法正确的是( )
如图所示,是小明家最近买的一台红色智能扫地机器人,是智能家用电器的一种,能自动完成房间内地板清理工作.它充好电后可以通过红外感应,识别地板上垃圾、辨别前方障碍物;并通过电动机的高速旋转,在主机内形成真空,利用由此产生的高速气流,从吸入口吸进垃圾,清扫完毕后能自动回到充电器进行充电.关于扫地机器人的说法正确的是( )
如图所示,是小明家最近买的一台红色智能扫地机器人,是智能家用电器的一种,能自动完成房间内地板清理工作.它充好电后可以通过红外感应,识别地板上垃圾、辨别前方障碍物;并通过电动机的高速旋转,在主机内形成真空,利用由此产生的高速气流,从吸入口吸进垃圾,清扫完毕后能自动回到充电器进行充电.关于扫地机器人的说法正确的是( )| A. | 机器人外观呈现红色是因为它只反射红光 | |
| B. | 它是通过发射和接收电磁波来识别物体的 | |
| C. | 工作时利用了气体流速大压强大吸进垃圾 | |
| D. | 自动充电的过程中是将电能转化为化学能 |
 如图所示为一辆轿车的俯视图,E点为司机眼睛的位置,司机通过左侧的后视镜AB(看做平面镜)中能看到车尾后部S点,请画出其光路图(保留作图痕迹)
如图所示为一辆轿车的俯视图,E点为司机眼睛的位置,司机通过左侧的后视镜AB(看做平面镜)中能看到车尾后部S点,请画出其光路图(保留作图痕迹)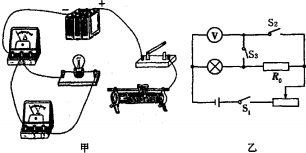 在“测量小灯泡的额定功率”实验中,灯泡上标有“3.8V”的字样,电源电压恒定不变.
在“测量小灯泡的额定功率”实验中,灯泡上标有“3.8V”的字样,电源电压恒定不变.
3.在水平地面上,某人用100N的拉力,使一物体在水平地面上匀速向前运动,则有关该物体所受摩檫力大小的分析,正确的是( )
| A. | 一定大于100N | B. | 一定小于100N | ||
| C. | 一定等于100N | D. | 条件不足,无法判断 |
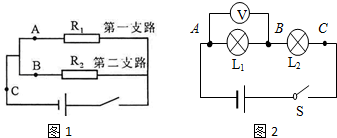
10.襄襄和樊樊在“探究并联电路中干路电流与各支路电流有什么关系”时,利用一个开关、一个电流表、一个学生电源(有多个电压档位)、四个阻值不等的电阻以及若干条导线,进行了大胆地探究.如图1所示是他们的实验电路图.
(1)他们的猜想是:并联电路中,干路电流等于各支路电流之和 (只写一种猜想).
[进行实验]
(2)襄襄按照电路图正确地进行实验,在连接电路时开关处于断开;得到了表1中的实验数据.襄襄在实验中,是靠只改变R1电阻大小而得到实验数据的:测量三次的目的是:多次测量,避免实验偶然性,寻找普遍规律.
表1
表2
(3)樊樊也按照上述同样的器材和同样的电路进行了实验,却得到了表2中的数据.樊樊在实验中是靠只改变电源电压而得到实验数据的.
(4)如图2,在襄襄同学另外在测量串联电路电压规律中测L2两端的电压时,为了节省实验时间,采用以下方法:电压表所接的B接点不动,只断开A接点,并改接到C接点上;瑞瑞同学用上面的方法能否测出L2两端的电压?为什么?不能,电压表正负接线柱接反了.
(1)他们的猜想是:并联电路中,干路电流等于各支路电流之和 (只写一种猜想).
[进行实验]
(2)襄襄按照电路图正确地进行实验,在连接电路时开关处于断开;得到了表1中的实验数据.襄襄在实验中,是靠只改变R1电阻大小而得到实验数据的:测量三次的目的是:多次测量,避免实验偶然性,寻找普遍规律.
表1
| 实验第次 | IA/A | IB/A | IC/A |
| 1 | 0.1 | 0.2 | 0.3 |
| 2 | 0.4 | 0.2 | 0.6 |
| 3 | 0.8 | 0.2 | 1.0 |
| 实验第次 | IA/A | IB/A | IC/A |
| 1 | 0.2 | 0.1 | 0.3 |
| 2 | 0.4 | 0.2 | 0.6 |
| 3 | 0.6 | 0.3 | 0.9 |
| 4 | 0.8 | 0.4 | 1.2 |
(4)如图2,在襄襄同学另外在测量串联电路电压规律中测L2两端的电压时,为了节省实验时间,采用以下方法:电压表所接的B接点不动,只断开A接点,并改接到C接点上;瑞瑞同学用上面的方法能否测出L2两端的电压?为什么?不能,电压表正负接线柱接反了.

 如图所示,一根硬棒左端固定在竖直墙面上,硬棒可绕O点灵活转动,下方悬挂一重物A,右端施加一竖直向上的拉力F.该系统处于静止状态.请作出重物A的重力示意图和拉力F的力臂.
如图所示,一根硬棒左端固定在竖直墙面上,硬棒可绕O点灵活转动,下方悬挂一重物A,右端施加一竖直向上的拉力F.该系统处于静止状态.请作出重物A的重力示意图和拉力F的力臂.