题目内容
【题目】物理实验复习时,小华和小明再探究有关杠杆平衡的问题:
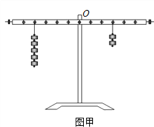
(1)小华先将杠杆调节至水平位置平衡,在左右两侧各挂如甲图所示的钩码后,杠杆的左端下降。要使杠杆重新在水平位置平衡,如果不改变钩码总数和悬挂点位置,只需将__________即可。
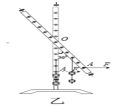
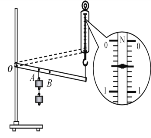
(2)小丽还想探究当动力和阻力在杠杆同侧时杠杆的平衡情况,于是她将杠杆左侧的所有钩码拿掉,结果杠杆转至竖直位置,如图乙所示。小丽在A点施加一个始终水平向右的拉力F,却发现无论用多大的力都不能将杠杆拉至水平位置平衡。你认为原因是_______________。
(3)他们认为(2)问中拉力是做功的。如果水平向右的拉力F大小不变,OA长L,将杠杆从竖直位置拉着转过30°的过程中,拉力F做功为______。
(4)杠杆处于图乙所示位置时,小华同学就在杠杆上挂钩码进行实验,小明认为这样操作会对实验产生以下影响:
①杆自身重力可能会对实验产生影响
②可能不便于测量力臂或出现力臂测量错误
③无法得出杠杆平衡条件
你认为正确的是________。
A.①② B.①③ C.②③
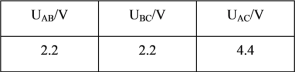
(5)为了进一步研究杠杆的机械效率与哪些因素有关,实验时,竖直向上匀速拉动弹簧测力计,使挂在较长杠杆下面的钩码缓缓上升。一位同学用该实验装置,先后将钩码挂在A、B两点,测量并计算得到下表所示的两组数据:
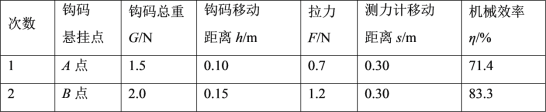
根据表中数据,能否得出“杠杆的机械效率与所挂钩码的重有关,钩码越重其效率越高”的结论?
答:______;请简要说明一条理由:__________________________
【答案】取下2个钩码挂到右侧钩码下 水平位置时动力臂为0杠杆无法平衡 二分之一FL A 不能 两次实验时钩码没有挂在同一位置(仅根据一次对比实验所得的结论是不可靠的)
【解析】
(1)根据杠杆的平衡条件计算不改变钩码总数和悬挂点位置时,挂钩码情况;(2)分析F作用下其力臂变化情况,根据杠杆的平衡条件找到原因;(3)分析F在杠杆从竖直位置转过30°的过程中F水平移动距离,根据W=Fs计算拉力F做的功.(4) 调节杠杆两端的螺母,使杠杆在不挂钩码时处于水平平衡状态,这时杠杆的重心在支点上,使杠杆的自重对杠杆平衡不产生影响,且便于测量力臂.(5)通过探究实验时,应进行多次实验,分析多组数据,才能得出正确结论.分析机械效率的影响因素采取控制变量法.
(1)力臂等于支点到力的作用线的垂直距离,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆标尺刻度上直接读出来,便于测量力臂。若每个钩码重为G,杠杆上每格长L,由图甲,左侧力与力臂的乘积:5G×4L=20GL,右侧力与力臂的乘积:2G×3L=6GL,因为:20GL>6GL,所以杠杆左侧下降;如果不改变钩码总数和悬挂点位置,若要杠杆平衡,设从左侧取下n个钩码挂到右侧,则:(5n)G×4L=(2+n)G×3L,解得:n=2,即需将左侧2个钩码挂到右侧即可;
(2)由图将杠杆左侧的所有钩码拿掉,在A点施加一个始终水平向右的拉力F,当杠杆拉到水平位置时F的作用线通过支点,即力臂为0,根据杠杆的平衡条件所以始终不能平衡;
(3)图乙中,杠杆从竖直位置转过30的过程,立杆、OA和水平距离三者形成一个直角三角形,其中两个角分别为30和60,由几何知识可知,F水平移动距离为OA长的一半,即![]() L,所以拉力F做的功:W=Fs=F×
L,所以拉力F做的功:W=Fs=F×![]() L=
L=![]() FL.
FL.
(4)杠杆处于图甲所示位置时,杠杆没有调平就挂上钩码进行实验,杠杆的重心不在支点上,杠杆的自重对杠杆平衡产生影响,故①正确;杠杆不在水平位置平衡,力臂不在杠杆上,不便于测量力臂,不便于得出杠杆的平衡条件,但在测量方法正确时可以得出杠杆的平衡条件。故②正确,③错误。故选A.
(5)分析机械效率的影响因素应采取控制变量法,研究提起的物重和机械效率的关系时,应保持钩码所挂位置不变,而实验中,两次钩码悬挂的位置是不同的;同时,还应进行多次实验,分析多组数据,才能得出有说服力的正确结论,只凭一次实验数据做出结论是不科学的.

 阅读快车系列答案
阅读快车系列答案