��Ŀ����
2����ͼ��һ�ֿ������ɷ��С���ͣ��������������Ϊ������IJ��ֲ�������ش��������⣺
| ���� | 0.24ǧ�� | ������Dz��� | ̼��γ |
| ����� | 40�� | ���ѹ | 5�� |
��2���������һ��ʱ����������50�ף����������ڴ˹����п˷������������Ĺ���
��3������������������ʱ�ĵ�����
���� ��1�������ǰ����һ����ͷ����ͷ�൱��һ��������������Ĺ⾭���������ͷ�����ڽ����ϣ��γɱ���������������������ʱ������2�����࣬������1��������2������֮�䣬�ɵ�����С��ʵ��
��2����֪������������������������������W=Gh����ø�����ڴ˹����п˷������������Ĺ���
��3����֪����Ķ��ѹ�Ͷ���ʣ�����P=UI���ο������������ʱ�ĵ�����
��� �⣺��1�����������ԭ����������Ǹ���������2������ʱ���ɵ�������Сʵ���ԭ���Ƴɵģ���ʱ��ദ��1����2������֮�䣬
��2�����������G=mg=0.24kg��10N/kg=2.4N��
������ڴ˹����п˷������������Ĺ�W-=Gh=2.4N��50m=120J��
��3����P=UI�ɵã��������������ʱ�ĵ���I=$\frac{P}{U}$=$\frac{40W}{5V}$=8A��
�𣺣�1��u��2f��
��2��������ڴ˹����п˷������������Ĺ�Ϊ120J��
��3������������������ʱ�ĵ���Ϊ8A��
���� ������Ҫ���������������ɵ�Ӧ�ã����ļ��㣬�繦�ʹ�ʽ���ε�Ӧ�ã���һ���ۺ��Խ�ǿ����Ŀ��

��ϰ��ϵ�д�
 ͨ��ѧ��Ĭд����ϵ�д�
ͨ��ѧ��Ĭд����ϵ�д�
�����Ŀ
 ��ͼ��ʾ����Ϊ1.5N��Բ������ֱƯ����ˮ���ϣ�������S=30cm2���±����ѹ��F=1.5N����ˮ��Բ�����±����ѹǿp=500Pa��
��ͼ��ʾ����Ϊ1.5N��Բ������ֱƯ����ˮ���ϣ�������S=30cm2���±����ѹ��F=1.5N����ˮ��Բ�����±����ѹǿp=500Pa��
13����ͼ��ʾ���ĸ�ʵ���У�Ŀ����Ϊ������Ħ�����ǣ�������
| A�� |  ���г��ŵ����л��� | B�� |  ����������� | ||
| C�� |  �������г�������ʻ | D�� |  ��ľ��װ������ |
10�� �й��ѳ�Ϊ������������װ����ҵȫ�����Ӧ���г����ڵڶ����й������죩���ʻ����˼���������װ����̳�߲������ϣ���ͼ��ʾ���Ͳͻ����˹���ʱ��ˮƽ����������ǰ�У�����˵����ȷ���ǣ�������
�й��ѳ�Ϊ������������װ����ҵȫ�����Ӧ���г����ڵڶ����й������죩���ʻ����˼���������װ����̳�߲������ϣ���ͼ��ʾ���Ͳͻ����˹���ʱ��ˮƽ����������ǰ�У�����˵����ȷ���ǣ�������
�й��ѳ�Ϊ������������װ����ҵȫ�����Ӧ���г����ڵڶ����й������죩���ʻ����˼���������װ����̳�߲������ϣ���ͼ��ʾ���Ͳͻ����˹���ʱ��ˮƽ����������ǰ�У�����˵����ȷ���ǣ�������| A�� | ��������ڻ��������˶��� | |
| B�� | ������ʳƷ�ܵ�ƽ�������� | |
| C�� | ��������ˮƽ��������ǰ�й����л�е������ | |
| D�� | ��������ˮƽ��������ǰ��ʱ����Ħ���������� |
17���㽭��ѧ�����һ����̼Ԫ����ɵij������ʣ����ڲ�����һ�����϶��������̼���ࡱ��̼��������� ��������ԭ��й©�~��������ʱ�����������ո���ˮ���ϵ�ԭ�ͣ���ͨ����ѹ����̼�����ڵ�ԭ�ͽ��л��գ� �˹���û��Ӧ�õ����С�̼���ࡱ�����еģ�������
| A�� | �������ܺ� | B�� | �ױ�ѹ�� | ||
| C�� | �����͵�����ˮ | D�� | �ܶȺ�С���ܸ��ں����� |
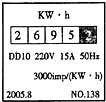 ��ͼ��С��ҵĵ���ʽ���ܱ�����һ����ϴ�裬�ر��˼��������õ�����ֻ�ü�����С�2000W���ĵ�����ԡ���������������ֵ��ܱ�ָʾ����˸��600impʱ����ԡ��������ˮ�´�23�����ߵ�43�棬�����ĵĵ�����0.2kW•h��ͨ��ʱ����6min�����ˮ���յ���Щ������ȫȼ��0.021m3����Ȼ���ṩ��q��Ȼ��=4.0��107J/m3 Cˮ=4.2��103J/��kg•�棩������������ʧ����ˮ����ˮ��������10kg��ˮ����ˮ���ܵĸı���ͨ���ȴ���ʵ�ֵģ����õ紵�紵��ͷ��ʱ�����ִ��ȷ�ȴ�����������ͷ����ɣ����������ȷ���¶ȱ�����¶ȸߣ�
��ͼ��С��ҵĵ���ʽ���ܱ�����һ����ϴ�裬�ر��˼��������õ�����ֻ�ü�����С�2000W���ĵ�����ԡ���������������ֵ��ܱ�ָʾ����˸��600impʱ����ԡ��������ˮ�´�23�����ߵ�43�棬�����ĵĵ�����0.2kW•h��ͨ��ʱ����6min�����ˮ���յ���Щ������ȫȼ��0.021m3����Ȼ���ṩ��q��Ȼ��=4.0��107J/m3 Cˮ=4.2��103J/��kg•�棩������������ʧ����ˮ����ˮ��������10kg��ˮ����ˮ���ܵĸı���ͨ���ȴ���ʵ�ֵģ����õ紵�紵��ͷ��ʱ�����ִ��ȷ�ȴ�����������ͷ����ɣ����������ȷ���¶ȱ�����¶ȸߣ� ������������һ�ֺ�ͿȤζ�˶�����ͼ����С��˫����ס���������ϵĺᵵ��һֻ�Ź��ڡ��������ϣ���һֻ�������ź�Ϳ�������������ں�Ϳ�ϡ�������ɡ�����֪С������Ϊ62kg����������������Ϊ10kg�����������˶���ԡ�����������������Ӱ�죩
������������һ�ֺ�ͿȤζ�˶�����ͼ����С��˫����ס���������ϵĺᵵ��һֻ�Ź��ڡ��������ϣ���һֻ�������ź�Ϳ�������������ں�Ϳ�ϡ�������ɡ�����֪С������Ϊ62kg����������������Ϊ10kg�����������˶���ԡ�����������������Ӱ�죩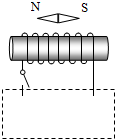 ��ͼ�еĵ������������Ƶĵ�·�У�����������ɣ���Ҫ���ܸı��������Ե�ǿ�����պϿ���S��С����������ֹʱ����N����ͼ��ʾ��
��ͼ�еĵ������������Ƶĵ�·�У�����������ɣ���Ҫ���ܸı��������Ե�ǿ�����պϿ���S��С����������ֹʱ����N����ͼ��ʾ��
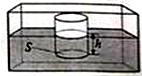
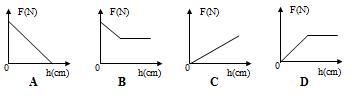
2��С��Ϊ��̽��������ˮ�в�ͬ������ܸ����仯�������ͼ��ʾ����һ���ڵ��ɲ������µ�Բ��������黺������ˮ�У�ˮ�㹻�����Բ����Ӵ�������֮ǰ���ֱ����Բ�����±��������IJ�ͬ���h�͵��ɲ�������Ӧ��ʾ��F��ʵ�����������
��1����������ʵ�����ݣ����Եó�������6.75N����4��ʵ��ʱ�������ܵ��ĸ���1.5N��
��2���������е�1�е���5�����ݣ�˵���������ܵĸ����������ſ�Һ������Ӷ�����
��3��ʵ��ʱӦ�Ȳ�������������ٷ���ˮ�в⸡�����ı��Ⱥ�˳���ʹ�����IJ������ƫ������С����
��4��ͼ������ȷ��ӳ���ɲ�����ʾ��F��Բ�����±��浽ˮ�����h��ϵ��ͼ����B
��5��Բ������ܶ�Ϊ2.7��103kg/m3��
| ���� | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| h��cm�� | 0 | 2 | 4 | 6 | 8 | 10 | 12 |
| F��N�� | 6.75 | 6.25 | 5.75 | 5.25 | 4.75 | 4.25 | 4.25 |
��2���������е�1�е���5�����ݣ�˵���������ܵĸ����������ſ�Һ������Ӷ�����
��3��ʵ��ʱӦ�Ȳ�������������ٷ���ˮ�в⸡�����ı��Ⱥ�˳���ʹ�����IJ������ƫ������С����
��4��ͼ������ȷ��ӳ���ɲ�����ʾ��F��Բ�����±��浽ˮ�����h��ϵ��ͼ����B
��5��Բ������ܶ�Ϊ2.7��103kg/m3��