题目内容
14. 如图所示,电源电压恒为4V,灯泡标有“4V 2W”字样(灯丝电阻不变).当S1、S2都闭合,且滑动变阻器R2的滑片P在中点时,电流表示数为0.9A,此时灯泡的功率为Pl,当S1、S2都断开时,灯泡实际消耗的功率为P2,且P2:P1=1:4.求:
如图所示,电源电压恒为4V,灯泡标有“4V 2W”字样(灯丝电阻不变).当S1、S2都闭合,且滑动变阻器R2的滑片P在中点时,电流表示数为0.9A,此时灯泡的功率为Pl,当S1、S2都断开时,灯泡实际消耗的功率为P2,且P2:P1=1:4.求:(1)灯泡的额定电流;
(2)R2的最大阻值;
(3)R1的阻值.
分析 (1)已知额定电压和额定功率即可利用P=UI即可求出额定电流;
(2)当S1、S2都闭合时,R2与灯泡L并联,电流表测干路电流;由于此时灯泡两端的实际电压与额定电压相等,则根据并联电路的电流特点求出通过变阻器的电流,利用欧姆定律求出滑动变阻器R2的滑片P在中点时连入电路的电阻,即可得出;
(3)当S1、S2都闭合时,R1被短路,灯泡L与滑动变阻器并联,由此可知,灯泡L两端的电压UL=U=4V,由P2:P1=1:4求得P2,然后根据P=I2R可求得R1的阻值.
解答 解:(1)由题意可知,灯泡的额定电压U0=4V,额定功率P0=2W,
由P=UI可得,灯泡的额定电流:I0=$\frac{{P}_{0}}{{U}_{0}}$=$\frac{2W}{4V}$=0.5A;
(2)灯泡的电阻RL=$\frac{{U}_{0}^{2}}{{P}_{0}}$=$\frac{{(4V)}^{2}}{2W}$=8Ω,
当S1、S2都闭合时,R1被短路,灯泡L与滑动变阻器并联,滑片P在中点,则滑动变阻器连入电路中的阻值为R中=$\frac{1}{2}$R2;
此时灯泡L中的电流为I′=$\frac{U}{{R}_{L}}$=$\frac{4V}{8Ω}$=0.5A,因为并联电路干路电流等于各支路电流之和,所以滑动变阻器中的电流为I中=I-I'=0.9A-0.5A=0.4A,
则滑动变阻器连入电路中的阻值:R中=$\frac{U}{{I}_{中}}$=$\frac{4V}{0.4A}$=10Ω,
所以滑动变阻器的最大阻值为R2=2R中=2×l0Ω=20Ω;
(3)当S1、S2都闭合时,R1被短路,灯泡L与滑动变阻器并联,灯泡L两端的电压UL=U=4V,所以灯泡正常发光,则此时灯泡的功率P1=2W,
由P2:P1=1:4可得,P2=$\frac{1}{4}$P1=$\frac{1}{4}$×2W=0.5W,
当S1、S2都断开时,电阻R1与灯泡L串联.
灯泡实际消耗的功率P2=I2RL=${(\frac{U}{{R}_{1}+{R}_{L}})}^{2}$RL,即0.5W=${(\frac{4V}{{R}_{1}+8Ω})}^{2}$×8Ω,
解得R1=8Ω.
答:(1)灯泡的额定电流为0.5A;
(2)R2的最大阻值为20Ω;
(3)R1的阻值为8Ω.
点评 本题考查了串并联电路的特点和欧姆定律的应用,分清电路的连接方式和利用好灯泡的电功率之比是解题的关键.

 永乾教育寒假作业快乐假期延边人民出版社系列答案
永乾教育寒假作业快乐假期延边人民出版社系列答案| A. | 会浮在水面上 | B. | 会悬浮在水中 | C. | 会沉入杯底 | D. | 无法判断 |
| 观察对象 | 有关记录和相关活动 |
| 观察电磁炉铭牌 | U额=220V P额=2000W |
| 观察电能表的铭牌 | 220V 20(40)A 50Hz 3000r/kW•h |
| 用电磁炉加热一壶水(水的质量为2kg,初温20℃) | 关闭家里其它用电器,只将电磁炉接入电路烧水观察电能表,表盘在3min内转了270转,此时用温度计测得的水温为50℃. |
(1)加热3min,水所吸收的热量;
(2)电磁炉工作3min消耗的电能是多少J?
(3)电磁炉的实际功率.
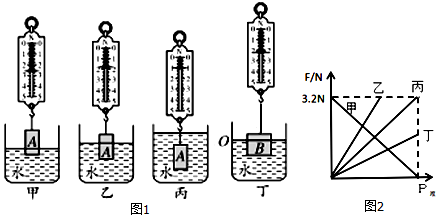
 将液氮注入装有超导物质的磁悬浮列车模型里,由于液氮迅速汽化(填物态变化的名称)并吸收热量,物质降温后变为超导体,使模型能悬浮在通电的环形轨道上.如图,当模型沿环形轨道匀速转弯时,其运动状态改变(填“改变”或“不变”).
将液氮注入装有超导物质的磁悬浮列车模型里,由于液氮迅速汽化(填物态变化的名称)并吸收热量,物质降温后变为超导体,使模型能悬浮在通电的环形轨道上.如图,当模型沿环形轨道匀速转弯时,其运动状态改变(填“改变”或“不变”). 在我国,家庭电路的电压是220V,零线和大地之间的电压是0V.为了安全起见,家用电器的金属外壳都必须可靠接地.图中,用于接地的导线应该接在插座的E孔.
在我国,家庭电路的电压是220V,零线和大地之间的电压是0V.为了安全起见,家用电器的金属外壳都必须可靠接地.图中,用于接地的导线应该接在插座的E孔. 阅读短文,回答问题:
阅读短文,回答问题:扫地机器人与吸尘器
扫地机器人是一款能自动清扫的智能家用电器,如图甲.
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.
表一:
| 额定工作电压 | 12V | 额定功率 | 30W | 清扫100m2运行时间50min |
| 电池容量 | 2500mAh | 工作噪音 | <50dB |
表二:
| 真空度(Pa) | 400 | 450 | 500 | 550 | 600 |
| 风量(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
| 吸入功率(W) | 10 | 9 | 8.25 | 7.8 |
(2)下列说法中错误的是C.
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
C.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
D.机器人工作时发出的声音不会对人的听力造成损伤
(3)该机器人正常工作时的电流为2.5A;充满电后至下一次自动充电前能够连续正常工作的最长时间为48min.
(4)由表二数据可知,当风量为0.017m3/s时,若其效率为34%,此时吸尘电机的输入功率为8.5W;上述风量下,10min内通过吸尘电机提出的空气质量为13.26kg.(取ρ空气=1.3kg/m3)
(5)如图乙为某传统吸尘器,表三为该吸尘器的部分数据.分析题中信息,从物理角度谈一下扫地机器人与传统的吸尘器相比,有哪些优点?50dB<75dB;噪音小环保、节能(写出两条)
表三:
| 额定工作电压 | 220V | 额定功率 | 1400W |
| 工作噪音 | <75dB | 清扫100m2工作时间 | 10min |
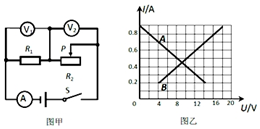
| A. | 图线A是电阻R1的I-U关系图象 | B. | 电源电压为18V | ||
| C. | R1的阻值是70Ω | D. | 滑动变阻器R2的最大阻值为20Ω |
| 最大飞行速度/(km/h) | 288 | 正常巡航速度/(km/h) | 160 |
| 最大续航时间/h | 20 | 发动机额定功率/kW | 75 |
| 最大载荷量/kg | 200 | 最大载燃油量/kg | 300 |
| 机身质量/t | 1.1 | 机身长度/m | 9.0 |
(2)若翼龙无人机满载燃油,并以最大载荷量停在水平跑道上,此时无人机轮胎与地面接触的总面积为400cm2.此时无人机对水平跑道的压强.