题目内容
10.如图所示的是建筑工地常用的铲车,以下分析错误的是( )
| A. | 铲车利用液压技术能产生较大的力 | |
| B. | 铲车铁斗上升的过程中,机械手臂相当于省力杠杆 | |
| C. | 铲车宽大的轮子可以增大受力面积,减小对地面的压强 | |
| D. | 铲车轮子表面凹凸不平的花纹可以增大摩擦 |
分析 (1)加在密闭液体上的压强,能被液体大小不变的向各个方向传递;.
(2)动力臂大于阻力臂是省力杠杆;动力臂小于阻力臂是费力杠杆;动力臂等于阻力臂是等臂杠杆.
(3)压强大小的影响因素:压力大小和受力面积大小,压力越大,受力面积越小,压强越大.
(4)摩擦力大小的影响因素:压力大小和接触面的粗糙程度.增大压力,增大接触面的粗糙程度,可以增大摩擦力.
解答 解:
A、由帕斯卡原理可知:密闭液体能大小不变的传递压强,在小的面积上施加一个小力,在大的面积上能得到一个大力;铲车是利用液压技术能产生较大的力,故A正确.
B、如图,做出机械手臂的动力和阻力,可知动力臂小于阻力臂,所以机械手臂是费力杠杆,可以少移动距离.故B错误.
C、铲车宽大的轮子是在压力一定时,增大受力面积,减小对地面的压强,故C正确.
D、铲车轮子表面凹凸不平的花纹是在压力一定时,增大接触面的粗糙程度来增大摩擦,故D正确.
故选B.
点评 此题通过铲车考查了增大或减小摩擦的方法、杠杆的分类、帕斯卡原理及其应用等多个知识点,综合性较强,要认真审题!

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
20.如图所示,下表是某实验小组同学做“研究滑动摩擦力的大小跟哪些因素有关”的实验记录.
(1)实验中,弹簧测力计显示的读数是拉力的大小,间接测得滑动摩擦力大小的关键是要保证木块做匀速直线运动.根据二力平衡知识可知,可以得到木块所受的滑动摩擦力的大小.
(2)本实验采用的研究物理问题的方法是控制变量法和转换法.
(3)分析比较序号1和2的实验数据,可得出的结论是:在接触面粗糙程度相同时,压力越大,滑动摩擦力越大.
(4)分析比较序号2和3的实验数据,可以得出的结论是:在压力相同时,接触面间越粗糙,滑动摩擦力越大.
| 实验次数 | 接触面的材料 | 压力/N | 滑动摩擦力/N |
| 1 | 木块与木板 | 4 | 0.8 |
| 2 | 木块与木板 | 6 | 1.2 |
| 3 | 木块与毛巾 | 6 | 2.5 |
(1)实验中,弹簧测力计显示的读数是拉力的大小,间接测得滑动摩擦力大小的关键是要保证木块做匀速直线运动.根据二力平衡知识可知,可以得到木块所受的滑动摩擦力的大小.
(2)本实验采用的研究物理问题的方法是控制变量法和转换法.
(3)分析比较序号1和2的实验数据,可得出的结论是:在接触面粗糙程度相同时,压力越大,滑动摩擦力越大.
(4)分析比较序号2和3的实验数据,可以得出的结论是:在压力相同时,接触面间越粗糙,滑动摩擦力越大.
1.关于保险丝熔断的原因,下列情况不可能的是( )
| A. | 插座内部“碰线” | B. | 灯座内部“碰线” | C. | 插头内部“碰线” | D. | 开关内部“碰线” |
 阅读《液压传动》,回答问题.
阅读《液压传动》,回答问题.
5.下列实验中,不能用来说明“分子在不停地运动”的是( )
| A. | 潮湿的地面会变干 | B. | 炒菜时加点盐,菜有了咸味 | ||
| C. | 扫地时,灰尘飞扬 | D. | 房间里放篮苹果,满屋飘香 |
2.关于凸透镜的应用,下列说法正确的是( )
| A. | 使用放大镜,想看到更大的正立的像,应把放大镜远离被观察物体 | |
| B. | 使用投影仪,想使屏幕上的像更大些,投影仪镜头应该离屏幕更近一些 | |
| C. | 照相机利用了凸透镜成倒立、缩小、实像的原理工作 | |
| D. | 近视眼应佩戴凹透镜进行矫正视力 |
12.小明同学在“研究杠杆平衡条件”实验中:
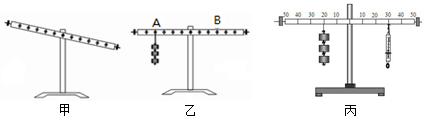
(1)实验时应先调节杠杆在水平位置平衡,目的是便于测量力臂;若出现图甲所示情况,应将杠杆的螺母向左(选填“左”或“右”)调.
(2)杠杆平衡后,小明在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平衡,这时应在B位置挂上4个钩码.
(3)下表是该组某同学在实验中记录杠杆平衡的部分数据:
上表中空格处所缺的数据是:△=1,☆=20;
(4)分析上表中的实验数据可以得出的结论是F1L1=F2L2.
(5)接着又用弹簧测力计做了如图丙所示的实验,杠杆平衡后,保持弹簧测力计悬挂点不变,使其拉力方向斜向右下方,仍使杠杆水平平衡,弹簧测力计示数将变大(变大、变小或不变),这是因为动力臂变小了.
(1)实验时应先调节杠杆在水平位置平衡,目的是便于测量力臂;若出现图甲所示情况,应将杠杆的螺母向左(选填“左”或“右”)调.
(2)杠杆平衡后,小明在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平衡,这时应在B位置挂上4个钩码.
(3)下表是该组某同学在实验中记录杠杆平衡的部分数据:
| 实验次数 | F1(N) | l1 (cm) | F2 ( N) | l2( cm) |
| 1 | 2 | 5 | △ | 10 |
| 2 | 3 | 10 | 2 | 15 |
| 3 | 2 | 30 | 3 | ☆ |
(4)分析上表中的实验数据可以得出的结论是F1L1=F2L2.
(5)接着又用弹簧测力计做了如图丙所示的实验,杠杆平衡后,保持弹簧测力计悬挂点不变,使其拉力方向斜向右下方,仍使杠杆水平平衡,弹簧测力计示数将变大(变大、变小或不变),这是因为动力臂变小了.