题目内容
16. 如图所示,一根轻质木杆,A端细线下所挂50N的重物静止在水平地面上.当在B点加竖直向下的力F=15N作用时,木杆恰能在水平位置处于平衡状态,此时细线竖直.已知OA=15cm,OB=5cm,则重物对水平地面的压力为( )
如图所示,一根轻质木杆,A端细线下所挂50N的重物静止在水平地面上.当在B点加竖直向下的力F=15N作用时,木杆恰能在水平位置处于平衡状态,此时细线竖直.已知OA=15cm,OB=5cm,则重物对水平地面的压力为( )| A. | 65N | B. | 50N | C. | 45N | D. | 15N |
分析 利用杠杆平衡条件求重物对杠杆的拉力,再对重物进行受力分析,根据重物受力平衡求支持力,再根据力的作用是相互的求解.
解答 解:如图,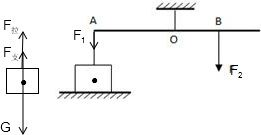
由杠杆平衡条件可得,
F1LOA=F2LOB
则F1=$\frac{{F}_{2}{L}_{OB}}{{L}_{OA}}$=$\frac{15N×5cm}{15cm}$=5N
又因为重物静止
所以重物受力平衡
G=F支+F拉,
所以:F支=G-F拉=G-F1=50N-5N=45N
因为力的作用是相互的
所以F压=45N.
故选C.
点评 物体静止或匀速直线运动,受力平衡,在水平方向或竖直方向的力平衡,知道一个力可求另一个力.

练习册系列答案
 口算小状元口算速算天天练系列答案
口算小状元口算速算天天练系列答案
相关题目
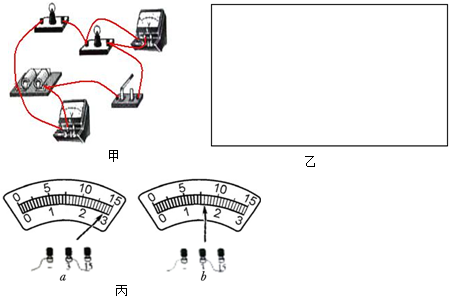
7.小刚和小丽用图所示的器材探究串联电路的电压关系:

(1)连接电路时,开关应该断开.
(2)根据电路图,请用笔画线代替导线,连接图2中的实物图.
(3)小刚用电压表测量L1两端的电压时,直接选用0~3V的量程,小丽说这样不行,规范的操作方法是先用0~15V的量程进行试触,如果试触结果不超过3V,再改用小量程测量.
(4)在测L2两端的电压时,小丽同学为了节省实验时间,采用以下方法:电压表所接的B接点不动,只断开A接点,并改接到C接点上,这样做不正确(选填“正确”或“不正确”),将会看到的现象是指针反转,原因是电压表的正负接线柱接反.
(5)同学们排除故障后继续实验,得出了下表所示的一组数据,接下来他们还应当B
A.更换电压表的量程重做实验
B.改变两个小灯泡的规格重做实验
(6)小刚接下来又按正确的方法测出了L1、L2及AC间的电压分别为:U1=2.4V,U2=1.4V,UAC的示数如图3所示,可读出UAC=4V.根据测量结果,在误差允许范围内你认为串联电路中用电器两端电压和电源电压的关系是UAC=U1+U2.

(1)连接电路时,开关应该断开.
(2)根据电路图,请用笔画线代替导线,连接图2中的实物图.
(3)小刚用电压表测量L1两端的电压时,直接选用0~3V的量程,小丽说这样不行,规范的操作方法是先用0~15V的量程进行试触,如果试触结果不超过3V,再改用小量程测量.
(4)在测L2两端的电压时,小丽同学为了节省实验时间,采用以下方法:电压表所接的B接点不动,只断开A接点,并改接到C接点上,这样做不正确(选填“正确”或“不正确”),将会看到的现象是指针反转,原因是电压表的正负接线柱接反.
(5)同学们排除故障后继续实验,得出了下表所示的一组数据,接下来他们还应当B
A.更换电压表的量程重做实验
B.改变两个小灯泡的规格重做实验
| L1两端电压/V | L2两端电压/V | 串联后的总电压/V |
| 1.4 | 3.1 | 4.5 |
 如图,用滑轮组匀速将1200N的重物在3S内提升2m,拉力所做功的功率为1000W,不考虑绳重和摩擦,求:
如图,用滑轮组匀速将1200N的重物在3S内提升2m,拉力所做功的功率为1000W,不考虑绳重和摩擦,求:
1.下列关于错误和误差的说法中不正确的是( )
| A. | 在实验过程中所发生的错误就是误差 | |
| B. | 实验过程中的错误可以避免,而误差不可避免 | |
| C. | 只要选用精密的仪器,认真读数就可以减小误差 | |
| D. | 在实验中采用多次测量求平均值的方法可以减小误差 |
8. 在“测量滑轮组的机械效率”的实验中,某组同学用同样的滑轮安装了如图甲、乙所示的滑轮组,实验测得的数据如表所示.
在“测量滑轮组的机械效率”的实验中,某组同学用同样的滑轮安装了如图甲、乙所示的滑轮组,实验测得的数据如表所示.
(1)表格内的第4次实验中应补充的数据是66.7%(结果精确到0.1%).这次数据是用图中甲(填“甲”或“乙”)所示的滑轮组测得的.
(2)分析比较第1、2、3次实验数据,可得结论:使用同样的滑轮组,提起的钩码越重,滑轮组的机械效率越高.某同学认为,使用相同的滑轮所组成的滑轮组提升同一个重物时,越省力的滑轮组机械效率越大,他的想法正确吗?不正确,表格中第1和4两次的数据就可以说明你的判断依据.
(3)实验中应该沿竖直方向匀速拉动弹簧测力计,如果在静止时读出测力计拉力大小,所计算得机械效率比实际效率高(填“高”或“低”).
 在“测量滑轮组的机械效率”的实验中,某组同学用同样的滑轮安装了如图甲、乙所示的滑轮组,实验测得的数据如表所示.
在“测量滑轮组的机械效率”的实验中,某组同学用同样的滑轮安装了如图甲、乙所示的滑轮组,实验测得的数据如表所示.| 次数 | 物体的重力G/N | 提升高度h/m | 拉力 F/N | 绳端移动的距离s/m | 机械效率 η |
| 1 | 2 | 0.1 | 1 | 0.3 | 66.7% |
| 2 | 3 | 0.1 | 1.4 | 0.3 | 71.4% |
| 3 | 4 | 0.1 | 1.8 | 0.3 | 74.1% |
| 4 | 2 | 0.1 | 1.5 | 0.2 |
(2)分析比较第1、2、3次实验数据,可得结论:使用同样的滑轮组,提起的钩码越重,滑轮组的机械效率越高.某同学认为,使用相同的滑轮所组成的滑轮组提升同一个重物时,越省力的滑轮组机械效率越大,他的想法正确吗?不正确,表格中第1和4两次的数据就可以说明你的判断依据.
(3)实验中应该沿竖直方向匀速拉动弹簧测力计,如果在静止时读出测力计拉力大小,所计算得机械效率比实际效率高(填“高”或“低”).
6.小明和小红一起做探究杠杆平衡条件的实验:
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时发现杠杆左端下倾,如图甲所示,则他们应该将杠杆右端的平衡螺母向右(选填“右”或“左”) 调,使杠杆在水平位置平衡.

(2)在杠杆的两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,如图乙所示,并测出力臂.多次实验并把数据记录在表格中.实验时使杠杆在水平位置平衡的目的是:便于测量力臂.
(3)小明根据以上数据得出杠杆的平衡条件是动力×动力臂=阻力×阻力臂(或F1L1=F2L2).
(4)小红将图乙中杠杆两侧的钩码各取下一个,杠杆将左侧下降(选填“仍能平衡”“右侧下降”或“左侧下降”).
(5)小红还想探究当动力和阻力在杠杆同侧时杠杆的平衡情况,于是她将杠杆左侧的所有钩码拿掉,结果杠杆转至竖直位置,如图丙所示.小红在A点施加一个始终水平向右的拉力F,却发现无论用多大的力都不能将杠杆拉至水平位置平衡.
你认为原因是水平位置时,动力臂为0,杠杆无法平衡.
(6)他们认为 (5)问中拉力是做功的.如果水平向右的拉力F大小不变,OA长L,将杠杆从竖直位置拉着转过30°的过程中,拉力F做功为$\frac{1}{2}$FL.
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时发现杠杆左端下倾,如图甲所示,则他们应该将杠杆右端的平衡螺母向右(选填“右”或“左”) 调,使杠杆在水平位置平衡.

(2)在杠杆的两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,如图乙所示,并测出力臂.多次实验并把数据记录在表格中.实验时使杠杆在水平位置平衡的目的是:便于测量力臂.
| 次数 | F1/N | l1/cm | F2/N | l2/cm |
| 1 | 1 | 10 | 2 | 5 |
| 2 | 2 | 10 | 1 | 20 |
| 3 | 2 | 15 | 3 | 10 |
(4)小红将图乙中杠杆两侧的钩码各取下一个,杠杆将左侧下降(选填“仍能平衡”“右侧下降”或“左侧下降”).
(5)小红还想探究当动力和阻力在杠杆同侧时杠杆的平衡情况,于是她将杠杆左侧的所有钩码拿掉,结果杠杆转至竖直位置,如图丙所示.小红在A点施加一个始终水平向右的拉力F,却发现无论用多大的力都不能将杠杆拉至水平位置平衡.
你认为原因是水平位置时,动力臂为0,杠杆无法平衡.
(6)他们认为 (5)问中拉力是做功的.如果水平向右的拉力F大小不变,OA长L,将杠杆从竖直位置拉着转过30°的过程中,拉力F做功为$\frac{1}{2}$FL.