题目内容
10. 中国已成为机器人与智能装备产业全球最大应用市场,在第二届中国(重庆)国际机器人及智能制造装备论坛暨博览会上,如图所示是送餐机器人工作时在水平地面上匀速前行.下列说法正确的是( )
中国已成为机器人与智能装备产业全球最大应用市场,在第二届中国(重庆)国际机器人及智能制造装备论坛暨博览会上,如图所示是送餐机器人工作时在水平地面上匀速前行.下列说法正确的是( )| A. | 餐盘相对于机器人是运动的 | |
| B. | 餐盘中食品受到平衡力作用 | |
| C. | 机器人在水平地面匀速前行过程中机械能增大 | |
| D. | 机器人在水平地面匀速前行时不受摩擦力的作用 |
分析 (1)世界上的一切物体都是运动的,绝对静止的物体是不存在的,我们所说的静止是相对的,是相对于参照物而言的;
(2)物体处于平衡状态时,所受的力是平衡力;
(3)动能的大小与物体的质量、速度有关;重力势能的大小与物体的质量、高度有关,动能和势能统称为机械能;
(4)摩擦力的产生条件是:两个物体相互接触,有一个相对运动的趋势;
解答 解:A、餐盘相对于机器人来说,其相对位置没有改变,所以处于相对静止状态,故A错误;
B、由于餐盘处于匀速直线的运动状态,所以是平衡状态,即所受的力是平衡力,故B正确;
C、机器人在水平地面匀速前行过程中质量不变,速度不变,动能不变,高度不变,重力势能也不变,所以机械能不变,故C错误;
D、送餐机器人工作时在水平地面上匀速前行,与地面接触,且有一个运动的趋势,所以会受到摩擦力,故D错误;
故选B.
点评 此题考查了运动和静止相对性的判断、平衡状态的理解、机械能的影响因素和物体受摩擦力的条件,是一道综合题.

练习册系列答案
相关题目
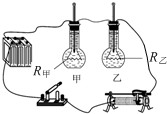 在“探究影响电流通过电阻丝产生热量多少的因素”时,设计了如图所示的电路,烧瓶中盛有质量、初温均相等的煤油,R甲>R乙.
在“探究影响电流通过电阻丝产生热量多少的因素”时,设计了如图所示的电路,烧瓶中盛有质量、初温均相等的煤油,R甲>R乙.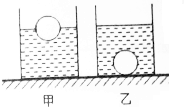 如图所示,把一小球先后放入盛有不同液体的甲、乙两个容器中,在甲容器中小球漂浮在液面上,在乙容器中小球加速下沉到容器底部.小球在甲、乙容器中受到的浮力为F甲>F乙,甲、乙容器中的液体密度为ρ甲>ρ乙.
如图所示,把一小球先后放入盛有不同液体的甲、乙两个容器中,在甲容器中小球漂浮在液面上,在乙容器中小球加速下沉到容器底部.小球在甲、乙容器中受到的浮力为F甲>F乙,甲、乙容器中的液体密度为ρ甲>ρ乙.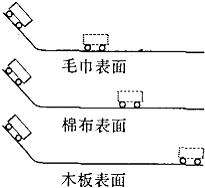 用如图所示的实验装置研究运动和力的关系.
用如图所示的实验装置研究运动和力的关系.
15.自行车的结构及使用涉及到不少科学知识,自行车的轮胎表面有凹凸不平的花纹是为了( )
| A. | 增大压力 | B. | 增大摩擦力 | C. | 减小压力 | D. | 减小摩擦 |
2.如图是一种可以自由飞行、悬停的无人相机.如表为该相机的部分参数,请回答下列问题:

(1)已知该相机镜头的焦距为f,在正常拍射时,镜头与被拍摄物体间的距离u应满足u>2f(选填“u>2f”、“f<u<2f”)
(2)该相机在一定时间内升离了50米,计算该相机在此过程中克服自身重力做的功.
(3)计算该相机正常工作时的电流.
| 质量 | 0.24千克 | 机翼外壳材料 | 碳纤纬 |
| 额定功律 | 40瓦 | 额定电压 | 5伏 |
(2)该相机在一定时间内升离了50米,计算该相机在此过程中克服自身重力做的功.
(3)计算该相机正常工作时的电流.
19.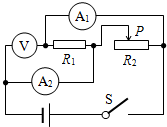 如图所示的电路中,电源电压不变,R1为定值电阻,R2为滑动变阻器,闭合开关S后,在滑片P从最左端向中心移动的过程中,下列说法正确的是( )
如图所示的电路中,电源电压不变,R1为定值电阻,R2为滑动变阻器,闭合开关S后,在滑片P从最左端向中心移动的过程中,下列说法正确的是( )
如图所示的电路中,电源电压不变,R1为定值电阻,R2为滑动变阻器,闭合开关S后,在滑片P从最左端向中心移动的过程中,下列说法正确的是( )| A. | 电流表A1和电流表A2的示数都变大 | |
| B. | 电路总功率变大,电压表的V的示数不变 | |
| C. | 电路总功率变小,电压表V的示数不变 | |
| D. | 电流表A2和电压表V的示数都保持不变 |
10.在“观察水的沸腾”的实验中,某个实验小组得到下列的实验记录表格:
(1)从记录数据看,第11min的数据有明显错误,此时水的沸点应为98℃.
(2)停止加热后,水不能(”能”或”不能”)继续沸腾.
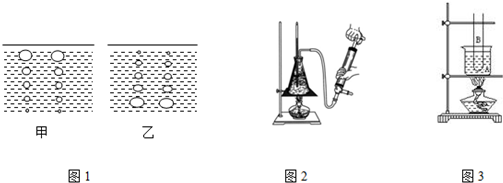
(3)图1所示的是甲、乙两杯水被加热时水中气泡上升的情形,其中甲最可能是水沸腾前的情形.
(4)如图2所示,先不接两用气筒,将三角烧瓶中的水加热到沸腾时,温度计的示数为100℃;此时,通过直角管用两用气筒向烧瓶内打气,见到的现象是①水将停止沸腾(“停止”或“继续”);②温度计的示数升高(“升高”或“不变”);由以上实验现象得出的物理规律在家庭中的高压锅上得到应用.
(5)如图3所示,在盛水的烧杯内放入一装水的试管,用酒精灯对烧杯缓慢加热,当烧杯中的水沸腾后,继续加热.则试管中的水不会(“会”或“不会”)沸腾.
| 时间/mim | …6 7 8 9 10 11 12 13 14 15 |
| 温度/℃ | …95 96 97 98 98 95 98 98 98 98 |
(2)停止加热后,水不能(”能”或”不能”)继续沸腾.
(3)图1所示的是甲、乙两杯水被加热时水中气泡上升的情形,其中甲最可能是水沸腾前的情形.
(4)如图2所示,先不接两用气筒,将三角烧瓶中的水加热到沸腾时,温度计的示数为100℃;此时,通过直角管用两用气筒向烧瓶内打气,见到的现象是①水将停止沸腾(“停止”或“继续”);②温度计的示数升高(“升高”或“不变”);由以上实验现象得出的物理规律在家庭中的高压锅上得到应用.
(5)如图3所示,在盛水的烧杯内放入一装水的试管,用酒精灯对烧杯缓慢加热,当烧杯中的水沸腾后,继续加热.则试管中的水不会(“会”或“不会”)沸腾.