题目内容
14.(1)如图1所示,a、b是镜前一点光源S发出的光线经平面镜反射后的两条反射光线,请在图中根据反射光线a、b画出点光源S的位置.(2)如图2所示,请在图中完成光路图.
(3)如图3所示,浸没在水中的小球正在加速上浮,请画出其受力的示意图.
(4)如图4所示,请在杠杆A处画出物体拉起时的最小拉力F1,并画出拉力F1的力臂L1.

分析 (1)根据反射光线反向延长过像点,作出反光点的像点S′,再根据平面镜成像的特点:像与物关于平面镜对称作出发光点S的位置,补出入射光线.
(2)在作凹透镜的光路图时,先确定所给的光线的特点再根据透镜的光学特点来作图.
(3)浸没在水中的小球在水中上浮,是因为浮力大于重力,分别按力的示意图的作法作出浮力和重力.
(4)由杠杆平衡的条件知,当阻力与阻力的力臂的乘积为定值时,动力臂最大时,动力是最小的,此时的动力臂是支点到动力的作用点的距离.
解答 解:(1)先将两条反射光线反向延长交于一点S′,在通过平面镜作出S′的对称点S,即为发光点的位置,并联接S与两个反射点画出入射光线,如图所示: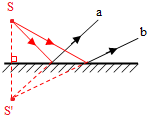
(2)平行于主光轴的光线经凹透镜折射后,其折射光线的反向延长线过焦点.过光心的光线经凹透镜折射后传播方向不改变.如图所示: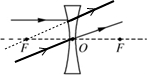
(3)浮力、重力均作在重心上,重力G竖直向下,浮力F竖直向上,浮力的长度大于重力,如图: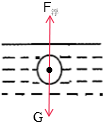
(4)根据杠杆的平衡条件,动力F1最小时,其力臂最长,即从支点到动力作用点的距离OA最长;在A点做力臂OA的垂线,方向向上,即为最小动力F1,OA的长度即为该力的力臂,如图所示:
点评 (1)根据平面镜成像的特点完成本题较为直观、准确,因此建议同学们用平面镜成像的特点作图.
(2)凹透镜三条特殊光线的作图:①延长线过另一侧焦点的光线经凹透镜折射后将平行于主光轴.②平行于主光轴的光线经凹透镜折射后,其折射光线的反向延长线过焦点.③过光心的光线经凹透镜折射后传播方向不改变.
(3)重力和浮力一般能作出,易错点在于画不出浮力的长度大于重力.
(4)力臂的画法应始终遵循从支点到力的作用线画垂线这一原则;找最小的力时则一定要遵循找最长的力臂这一原则.明确了这些才能按一定的作图规则将力或力臂表示出来.

 天天向上口算本系列答案
天天向上口算本系列答案 晶晶在做“探究串联电路中电压的规律”实验时,连接了如图所示的电路,闭合开关后,发现两灯均不亮,经检查,电路连接正确.晶晶正确地使用电压表检查该电路的故障,测量结果如表格所示.若电路中仅有一处发生断路故障,根据表中数据可知,发生断路故障的电路元件为S(选填“L1”、“L2”或“S”).
晶晶在做“探究串联电路中电压的规律”实验时,连接了如图所示的电路,闭合开关后,发现两灯均不亮,经检查,电路连接正确.晶晶正确地使用电压表检查该电路的故障,测量结果如表格所示.若电路中仅有一处发生断路故障,根据表中数据可知,发生断路故障的电路元件为S(选填“L1”、“L2”或“S”).| 电压表两接线柱与电路的连接位置 | AB | AC | AD | BC | CD |
| 电压U/V | 0 | 0 | 3 | 0 | 3 |
| A. | 等于50g | B. | 大于50g | ||
| C. | 小于50g | D. | 条件不足,不能确定 |
| A. | 内能小的物体也可能将热量传给内能大的物体 | |
| B. | 闻到桂花香是分子在不停地做无规则运动的结果 | |
| C. | 冬天人们在温泉池中觉得暖和是利用热传递来改变人体内能的 | |
| D. | 气体很容易被压缩的原因是气体分子间没有作用力 |

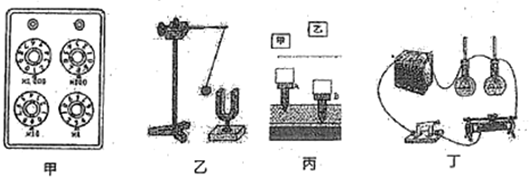
| A. | 四个实验中,都有电流的磁效应发生 | |
| B. | 乙实验中,闭合开关后导体棒ab由静止变为运动,这个过程中机械能转化为电能 | |
| C. | 丙实验中,两线圈匝数不同,滑动变阻器的滑片向左移动,电磁铁吸引大头针个数不同,说明电磁铁磁性强弱与电流大小无关 | |
| D. | 丁实验中,导体棒ab水平向左运动,电流表指针发生偏转,说明只要导体在磁场中运动,就一定能产生电流 |
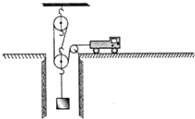 如图所示,是一辆汽车通过滑轮组将深并中的物体拉至井口的装置图.己知井深12m,物体重6×103N,汽车重G车=3×104N,汽车匀速拉绳子时的拉力F=2.5×103N,汽车受到的阻力为车重的0.1倍.求:
如图所示,是一辆汽车通过滑轮组将深并中的物体拉至井口的装置图.己知井深12m,物体重6×103N,汽车重G车=3×104N,汽车匀速拉绳子时的拉力F=2.5×103N,汽车受到的阻力为车重的0.1倍.求:(1)在“探究杠杆平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量力臂;如发现杠杆左端偏高,则可将右端的平衡螺母向左调节,或将左端的平衡螺母向左调节;
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡.于是小明便得出了杠杆的平衡条件为:F1L1=F2L2.他这样得出的结论是否合理?不合理;为什么?只有一次实验,实验结论具有偶然性.
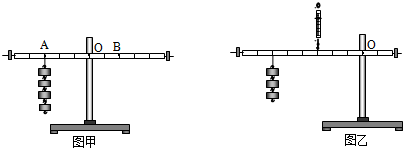
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:杠杆自身重力对杠杆的平衡有影响.
(4)实验时只有8个相同的钩码,杠杆上每格等距,如图甲,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①在支点右侧第三格处挂4个钩码;
②在支点右侧第四格处挂3个钩码.

(5)图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在表中.将表格中的实验数据补充完整.
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | |
| 2 | 1 | 20 | 10 | |
| 3 | 1 | 20 | 1.5 | 10 |