题目内容
2. 2015年央视春节联欢晚会上,有一个以“科技创新”为主题节目的表演.如图所示,人形机器人正在为观众表演舞蹈,其中涉及到的物理知识分析正确的是( )
2015年央视春节联欢晚会上,有一个以“科技创新”为主题节目的表演.如图所示,人形机器人正在为观众表演舞蹈,其中涉及到的物理知识分析正确的是( )| A. | 机器人表演舞蹈时没有惯性 | |
| B. | 机器人鞋底较宽是为了减小压力 | |
| C. | 机器人鞋底上凹凸不平的花纹是为了增大摩擦力 | |
| D. | 机器人站立时受到的重力和它对地面的压力是一对平衡力 |
分析 (1)一切物体都有保持原来运动状态不变的性质,叫惯性;
(2)在压力一定时,增大受力面积可以减小压强;
(3)在压力一定时,增大接触面的粗糙程度可以增大摩擦力;
(4)一对平衡力必须大小相等、方向相反、作用在一条直线上、作用在同一物体上.
解答 解:A、一切物体都有惯性,机器人表演舞蹈时也有惯性,故A错误;
B、机器人鞋底较宽是为了增大受力面积,减小压强,而不是减小压力,故B错误;
C、机器人鞋底上凹凸不平的花纹,增大了接触面的粗糙程度,是为了增大摩擦力,故C正确;
D、机器人站立时受到的重力和它对地面的压力作用在不同的物体上、方向也相同,所以它们不是一对平衡力,故D错误.
故选C.
点评 本题围绕机器人表演舞蹈考查了惯性、减小压强的应用、增大摩擦力的应用,以及平衡力的辨别等,有一定综合性,但难度不大.

练习册系列答案
 应用题天天练四川大学出版社系列答案
应用题天天练四川大学出版社系列答案
相关题目
 跳水运动员是我国在国际比赛中的优势项目.如图所示,跳水运动员站在跳板上静止时,她受到的重力和支持力是一对平衡力(选填“平衡力”或“相互作用力”),运动员将跳板压弯,说明力可以改变物体的形状.
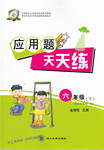
跳水运动员是我国在国际比赛中的优势项目.如图所示,跳水运动员站在跳板上静止时,她受到的重力和支持力是一对平衡力(选填“平衡力”或“相互作用力”),运动员将跳板压弯,说明力可以改变物体的形状. 如图甲所示电路,电源电压不变.闭合开关后,滑片P由b端滑到a端,电压表示数U与电流表示数I的变化关系如图乙所示,则可判断电源电压是9V,定值电阻R的阻值是6Ω,滑动变阻器的最大阻值为12Ω.
如图甲所示电路,电源电压不变.闭合开关后,滑片P由b端滑到a端,电压表示数U与电流表示数I的变化关系如图乙所示,则可判断电源电压是9V,定值电阻R的阻值是6Ω,滑动变阻器的最大阻值为12Ω.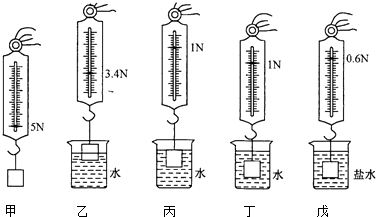
17.2014年韩国“岁月号”客轮在前往济州岛的途中进行急转弯时,船上装载的货物发生偏移,导致客轮侧翻.客轮急转时,船上装载的货物发生偏移的主要原因是( )
| A. | 货物所受的重力变小 | B. | 货物具有惯性 | ||
| C. | 货物受到的支持力变小 | D. | 货物受到了船舱给的力的作用 |
 如图所示,是学生很喜欢的一种运动--溜旱冰.旱冰鞋下面的轮子可以减小摩擦,从而使人更轻松的运动.想“刹车”停下来时,由于人具有惯性,还会向前滑动一段距离.
如图所示,是学生很喜欢的一种运动--溜旱冰.旱冰鞋下面的轮子可以减小摩擦,从而使人更轻松的运动.想“刹车”停下来时,由于人具有惯性,还会向前滑动一段距离.
14.某探究小组对如图的焦耳定律实验展开了讨论,其中表述正确的是( )
| A. | 烧瓶中装煤油,是因为煤油的比热小,升温快 | |
| B. | 两电阻丝电压相同,采用了控制变量法 | |
| C. | 材料、长度相同的两根电阻丝,粗的产热多 | |
| D. | 两支温度计可以用粗细不同的两根空心玻璃管代替 |
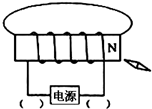 在如图所示,小磁针处于静止状态.标出小磁针N极、磁感应线的方向、在括号里标出电源正负极.
在如图所示,小磁针处于静止状态.标出小磁针N极、磁感应线的方向、在括号里标出电源正负极.