题目内容
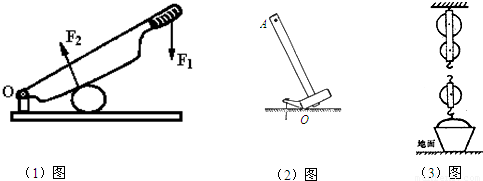
(1)作出图1 在闸刀使用中的两个力臂,并标明L1和L2.
(2)为使图2杠杆OA保持静止,画出在A点所加最小力F1的示意图和阻力F2的力臂l2.
(3)如图3某人站在A处用一根绳子和两个滑轮提起物体B,画出最省力的绕线.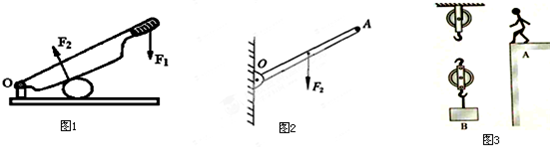
(2)为使图2杠杆OA保持静止,画出在A点所加最小力F1的示意图和阻力F2的力臂l2.
(3)如图3某人站在A处用一根绳子和两个滑轮提起物体B,画出最省力的绕线.
分析:(1)已知支点、动力和阻力的方向,根据力臂的画法,过支点作动力作用线和阻力作用线的垂线段,即动力臂和阻力臂.
(2)力臂是支点到力的作用线的距离.由杠杆的平衡条件可知,当杠杆平衡时,力臂最长,力最小.
(3)最省力的绕绳方法即是承担物重的绳子段数最多,先分析出应由3段绳子承担物重,才按照“奇动偶定”的原则确定绕绳方案.
(2)力臂是支点到力的作用线的距离.由杠杆的平衡条件可知,当杠杆平衡时,力臂最长,力最小.
(3)最省力的绕绳方法即是承担物重的绳子段数最多,先分析出应由3段绳子承担物重,才按照“奇动偶定”的原则确定绕绳方案.
解答:解:(1)延长动力作用线,过支点O作动力作用线的垂线段(即动力臂L1);阻力垂直于杠杆,过支点O作阻力作用线的垂线段(即阻力臂L2),如下图所示:
(2)由图知O是支点,F1作用在A点,最长力臂是OA,所以F1的方向要与OA垂直,这样才能保证其力臂是OA.如图所示.
过O点向力F2的作用线作垂线,作出力臂L2.如图所示:
(3)从动滑轮上挂钩开始,依次绕过定滑轮和动滑轮,绳端回到人的手中,则F=
为最省力的绕法,如图所示.
(2)由图知O是支点,F1作用在A点,最长力臂是OA,所以F1的方向要与OA垂直,这样才能保证其力臂是OA.如图所示.
过O点向力F2的作用线作垂线,作出力臂L2.如图所示:
(3)从动滑轮上挂钩开始,依次绕过定滑轮和动滑轮,绳端回到人的手中,则F=
| G |
| 3 |
点评:(1)力臂为支点到力的作用线的距离,为一垂线段,不是直线.注意最小力的判断:当杠杆平衡时,力臂最长的力就是最小力.
(2)本题主要考查了滑轮组的绕绳方法,应先分析承担物重的绳子的段数,再按一定的要求进行绕绳,同时还考查了重力的示意图,属基本作图内容.
(2)本题主要考查了滑轮组的绕绳方法,应先分析承担物重的绳子的段数,再按一定的要求进行绕绳,同时还考查了重力的示意图,属基本作图内容.

练习册系列答案
 同步轻松练习系列答案
同步轻松练习系列答案 课课通课程标准思维方法与能力训练系列答案
课课通课程标准思维方法与能力训练系列答案
相关题目