题目内容
18.做凸透镜成像实验时,凸透镜的焦距是10cm,把物体放在距透镜20cm的地方,在光屏上可以得到倒立、等大的实像,把物体向靠近透镜的方向移动5cm时,移动光屏,可以得到倒立、放大的实像,这种情况与幻灯机(选填“放大镜”、“幻灯片”或“照相机”)的成像情况相似.分析 凸透镜成像的三种情况和应用进行判断:
u>2f,成倒立、缩小的实像,应用是照相机;
U=2f,V=2f,此时成倒立等大的实像;
2f>u>f,成倒立、放大的实像,应用是投影仪和幻灯机;
u<f,成正立、放大的虚像,应用是放大镜.
解答 解:做凸透镜成像实验时,凸透镜的焦距是10cm,把物体放在距透镜20cm的地方,即物体处于2f处,所以成倒立、等大的实像;
把物体向靠近透镜的方向移动5cm时,即物体处于1倍焦距和2倍焦距之间,故移动光屏,可以得到倒立放大的实像,幻灯机或投影仪就是利用该原理制成的.
故答案为:倒立、等大;倒立、放大;幻灯机.
点评 本题主要考查的是凸透镜成像规律的应用,关键是记熟成像规律,并搞清成像特点与物距之间的关系.

练习册系列答案
 小学教材完全解读系列答案
小学教材完全解读系列答案
相关题目
 如图所示的电路中,电源电压保持不变,R2、R3 是两个定值电阻.闭合开关S、滑片P 向左滑动,电压表示数将减小;当电流表示数变化量的绝对值为△I 时,电压表示数变化量的绝对值为△U;当电流表示数变化量的绝对值为△I′时,电压表示数变化量的绝对值为△U′.若△I<△I′,则$\frac{△U}{△I}$等于$\frac{△U′}{△I′}$.(此空格填“大于”、“等于”或“小于”)
如图所示的电路中,电源电压保持不变,R2、R3 是两个定值电阻.闭合开关S、滑片P 向左滑动,电压表示数将减小;当电流表示数变化量的绝对值为△I 时,电压表示数变化量的绝对值为△U;当电流表示数变化量的绝对值为△I′时,电压表示数变化量的绝对值为△U′.若△I<△I′,则$\frac{△U}{△I}$等于$\frac{△U′}{△I′}$.(此空格填“大于”、“等于”或“小于”)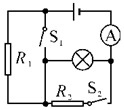 如图所示,电源电压不变,电阻R1=18?,灯泡的电阻为12?,当S1、S2闭合时,灯泡两端的电压为6V,电流表的示数是0.9A,求:
如图所示,电源电压不变,电阻R1=18?,灯泡的电阻为12?,当S1、S2闭合时,灯泡两端的电压为6V,电流表的示数是0.9A,求:
6.质量500g的某金属块,当温度升高80℃时,吸收了1.84×104J的热量,该金属块的比热容是多少?可能是哪种金属?
| 物质 | 比热容c/J•kg-1•C-1 |
| 铝 | 0.88×103 |
| 铁、钢 | 0.46×103 |
| 铜 | 0.39×103 |
| 汞 | 0.14×103 |
13.某同学测量一物体的长度,记录了四次测量结果,错误的是( )
| A. | 4.82 cm | B. | 4.83 cm | C. | 4.95 cm | D. | 4.81 cm |
3.如图是一个自动体重测试仪的工作原理图,有关它的说法正确的是( )

| A. | 体重显示表是用电压表改装成的 | |
| B. | 体重越大,体重显示表的示数越大 | |
| C. | 体重测试仪电路由于缺少开关,始终处于通路 | |
| D. | 体重测试仪所测体重越大,电路消耗电能越少 |
10.在“研究杠杆平衡”的实验中:
(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端的平衡螺母向左(填“左”、“右”)边转动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(2)实验中,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点4格的A处挂了3个钩码,如图1所示,为使杠杆在水平位置平衡,请你在杠杆右C处挂上4个 钩码.
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析结论,这样做的目的是避免偶然性,得到普遍规律..由此,总结出杠杆的平衡条件为:动力×动力臂=阻力×阻力臂.
(4)若某次实验中用弹簧测力计竖直向上拉杠杆一端的A点,如图2所示,杠杆平衡时弹簧测力计的示数为Fa,若在A点斜向上拉,杠杆要求在水平位置再次平衡时,弹簧测力计的示数为Fb,则Fa 小于Fb(填“大于、小于、等于”).
(5)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图3所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:杠杆自重的影响.

(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端的平衡螺母向左(填“左”、“右”)边转动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(2)实验中,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点4格的A处挂了3个钩码,如图1所示,为使杠杆在水平位置平衡,请你在杠杆右C处挂上4个 钩码.
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析结论,这样做的目的是避免偶然性,得到普遍规律..由此,总结出杠杆的平衡条件为:动力×动力臂=阻力×阻力臂.
| 次数 | 钩码重G/N | 钩码上升高度h/m | 有用功W有用/J | 测力计拉力F/N | 测力计移动距离S/m | 总功 W总/J | 机械效率η |
| 1 | 2 | 0.1 | 0.2 | 0.9 | 0.3 | 0.27 | 74.1% |
| 2 | 4 | 0.1 | 0.4 | 1.6 | 0.3 | 0.48 | 83.8% |
| 3 | 4 | 0.1 | 1.1 | 0.5 | 0.55 | |
(5)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图3所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:杠杆自重的影响.
