题目内容
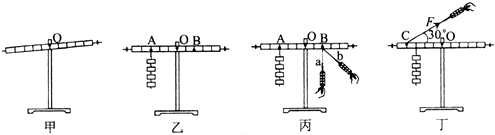
18.在“探究杠杆平衡条件的实验”中:(1)如图甲所示,实验前,杠杆左端下沉,则应将左端的平衡螺母向右调节(选填“左”或“右”,直到杠杆在水平位置平衡,目的是便于测量力臂的大小.
(2)如图乙所示,杠杆上的刻度均匀,在A点挂4个钩码,要使杠杆在水平位置平衡,应在B点挂6个相同的钩码;当杠杆平衡后,将A、B两点下方所挂的钩码同时朝远离支点O方向移动一小格,则杠杆不能(选填“能”或”不能“)在水平位置保持平衡.
(3)如图丙所示,若不在B点挂钩码,改用弹簧测力计在B点向下拉杠杆,使杠杆仍在水平位置平衡,当测力计从a位置转动b位置时,其示数大小将变大.
(4)如图丁所示,已知每个钩码重0.5N,杠杆上每小格长度为2cm,当弹簧测力计在C点斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡时,拉力F的力臂大小为4cm,弹簧测力计示数的大小为3N.
分析 (1)调节杠杆在水平位置平衡时,平衡螺母向上翘的一端移动;探究杠杆平衡条件时,使杠杆在水平位置平衡,这样方便测量力臂;
(2)设一个钩码重为G,杠杆一个小格是L,根据杠杆平衡条件判断在B点挂钩码的数量;根据杠杆平衡条件判断是否平衡;
(3)根据钩码个数与每个钩码的重力求出测力计拉力;当拉力F向右倾斜时,保持B点不动,弹簧测力计的方向向右倾斜,这时杠杆右侧的力臂变短,根据杠杆的平衡条件可知,使杠杆仍在水平位置平衡,则弹簧测力计的示数将变大;
(4)当弹簧测力计在C点斜向上拉(与水平方向成30°角)动力臂是$\frac{1}{2}$OC,根据杠杆的平衡条件求出弹簧测力计的读数.
解答 解:(1)调节杠杆在水平位置平衡,杠杆右端偏高,左端的平衡螺母应向上翘的右端移动,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小,同时消除杠杆自重对杠杆平衡的影响;
(2)设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:FALA=FBLB,即4G×3L=FB×2L,解得FB=6G,需挂6个钩码;
若A、B两点的钩码同时向远离支点的方向移动一个格,则左侧4G×4L=16GL,右侧6G×3L=18GL,因为16GL<18GL 杠杆不能平衡;
(3)保持B点不变,若拉力F向右倾斜时,此时F的力臂变短,根据杠杆的平衡条件,力变大;
(4)当弹簧测力计在C点斜向上拉(与水平方向成30°角)杠杆,此时动力臂等于$\frac{1}{2}$OC=$\frac{1}{2}$×4×2cm=4cm;根据杠杆的平衡条件F1L1=F2L2得F1=$\frac{{F}_{2}{L}_{2}}{{L}_{1}}$=$\frac{4×0.5N×3×2cm}{4cm}$=3N.
故答案为:(1)右;力臂的大小;(2)6;不能;(3)变大(4)4;3.
点评 此题是探究杠杆平衡实验,考查了杠杆的调平及杠杆平衡条件的应用,在利用平衡条件公式时,要注意分析力和对应的力臂.

 在探究凸透镜成像规律的实验中:
在探究凸透镜成像规律的实验中: 如图所示,是使用测量工具测量物理量的情境图,则图甲所示体温计的示数是36.5℃;则图乙所示刻度尺的分度值为1mm.
如图所示,是使用测量工具测量物理量的情境图,则图甲所示体温计的示数是36.5℃;则图乙所示刻度尺的分度值为1mm.
 实验小组在测滑轮组机械效率的实验中得到的数据如表所示,实验装置如图所示.请回答下列问题:
实验小组在测滑轮组机械效率的实验中得到的数据如表所示,实验装置如图所示.请回答下列问题:| 试验次数 | 1 | 2 |
| 钩码重G/N | 4 | 4 |
| 钩码上升高度h/m | 0.1 | 0.1 |
| 绳端拉力F/N | 1.8 | 1.6 |
| 绳端移动的距离s/m | 0.3 | 0.4 |
| 机械效率η | 74.1% |
(2)根据表中数据,可以计算出第2次实验中的机械效率应为η=62.5%.
(3)通过对第1次实验和第2次实验的数据分析可得出结论:使用不同的滑轮组提升相同的重物时,动滑轮的个数越多(或动滑轮的质量越大),滑轮组的机械效率越低(选填“越高”、“不变”或“越低”).
 如图所示是小梦从市场上买来的磁铁魔术玩具,它呈橄榄球形.两个橄榄球形磁铁抛起来后,在空中就会相互吸引、碰撞,发出类似蛇叫的清脆响声,故又名“响尾蛇蛋”.小梦想知道这个磁铁的磁极在哪儿呢?请你设计实验帮助小梦解决问题:
如图所示是小梦从市场上买来的磁铁魔术玩具,它呈橄榄球形.两个橄榄球形磁铁抛起来后,在空中就会相互吸引、碰撞,发出类似蛇叫的清脆响声,故又名“响尾蛇蛋”.小梦想知道这个磁铁的磁极在哪儿呢?请你设计实验帮助小梦解决问题: 如图所示,用20N的力F拉着重为100N的物体,使其沿水平面以2m/s的速度匀速运动了5s,若每个滑轮重10N,忽略绳重和滑轮轴的摩擦,则下列说法正确的是( )
如图所示,用20N的力F拉着重为100N的物体,使其沿水平面以2m/s的速度匀速运动了5s,若每个滑轮重10N,忽略绳重和滑轮轴的摩擦,则下列说法正确的是( )| A. | 拉力F做的功为200J | |
| B. | 拉力F的功率为120W | |
| C. | 滑轮组对物体做的有用功为400J | |
| D. | 滑轮组对物体所做有用功的功率为60W |
| A. |  光的反射 | B. |  光的折射 | C. |  平面镜成像 | D. |  近视眼矫正 |
 物理兴趣小组进行“探究水沸腾时温度变化的特点”的实验.
物理兴趣小组进行“探究水沸腾时温度变化的特点”的实验.