题目内容
4.如图所示的电路图,开关都闭合后,灯泡L1与L2串联的是( )| A. | 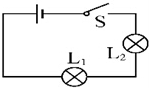 | B. | 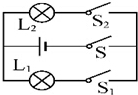 | C. | 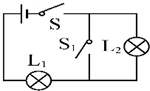 | D. | 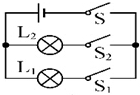 |
分析 串联电路中,电流的路径只有一条,各元件顺次逐个连接,并联电路中,电流有多条路径,各用电器并列连接,工作时互不影响,据此来结合电路图进行判断.
解答 解:A、开关闭合后,电流依次流过两只灯泡,只有一条流通路径,为串联电路;
BD、开关都闭合后,两只灯泡并列连接,工作时互不影响,为并联电路;
C、开关都闭合后,L2被短路,电路为L1的基本电路.
故选A.
点评 明确串并联电路的特点,根据串联电路只有一条路径,并联电路有多条路径,可对电路图的连接情况做出判断.

练习册系列答案
 云南师大附小一线名师提优作业系列答案
云南师大附小一线名师提优作业系列答案
相关题目
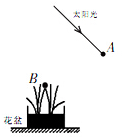 小宇的妈妈喜欢在家中养花,为了使客厅里花盆中的花茁壮成长,小宇想让室外太阳光照射到盆中花上的B处,如图所示,请你在图中把光路补充完整并过A点画出放置的平面镜.
小宇的妈妈喜欢在家中养花,为了使客厅里花盆中的花茁壮成长,小宇想让室外太阳光照射到盆中花上的B处,如图所示,请你在图中把光路补充完整并过A点画出放置的平面镜.
15.小明在探究“杠杆平衡条件”的实验中.
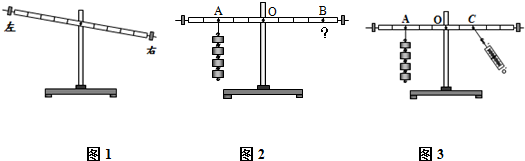
(1)杠杆在支架上的状态如图1所示,此时应把平衡螺母向左(填“左”或“右”)调节,使杠杆在不挂钩码时,保持其水平并静止.这样做的好处是:便于在杠杆上直接测量力臂.
(2)小明在杠杆两边挂钩码(每个钩码相同),不断改变动力或动力臂的大小,调节阻力或阻力臂的大小,使杠杆重新平衡,记录数据如上表.分析表中的数据,得出杠杆的平衡条件是F1L1=F2L2.
(3)在图2,杠杆质量不计,杠杆每格的距离均相等.当A处挂4个钩码,在B处挂3个钩码时,杠杆在水平位置仍然平衡;若A、B两处的钩码均向支点O移动两格后,杠杆将向右(填“左”或“右”)端倾斜.
(4)在图3,A处钩码重2N,在C处用弹簧测力计斜向下拉.当杠杆在水平位置平衡时,弹簧测力计的示数将大于(填“大于”、“等于”或“小于”)3N.
| 实验 次数 | 动力 F1 /N | 动力臂 l1 /cm | 阻力 F2 /N | 阻力臂 l2 /cm |
| 1 | 2.0 | 5 | 1.0 | 10 |
| 2 | 2.0 | 10 | 2.0 | 10 |
| 3 | 3.0 | 10 | 2.0 | 15 |
(2)小明在杠杆两边挂钩码(每个钩码相同),不断改变动力或动力臂的大小,调节阻力或阻力臂的大小,使杠杆重新平衡,记录数据如上表.分析表中的数据,得出杠杆的平衡条件是F1L1=F2L2.
(3)在图2,杠杆质量不计,杠杆每格的距离均相等.当A处挂4个钩码,在B处挂3个钩码时,杠杆在水平位置仍然平衡;若A、B两处的钩码均向支点O移动两格后,杠杆将向右(填“左”或“右”)端倾斜.
(4)在图3,A处钩码重2N,在C处用弹簧测力计斜向下拉.当杠杆在水平位置平衡时,弹簧测力计的示数将大于(填“大于”、“等于”或“小于”)3N.
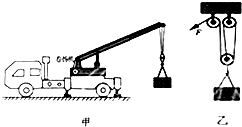 如图甲所示的是一台汽车起重机的示意图,起重钩的升降使用的是滑轮组,如图乙所示,滑轮组上钢丝绳的收放是由卷扬机来完成的.某次做业中,起重机将200kg的货物由地面起吊到5m的高度,所用时间为20s,钢丝绳的拉力F为800N.求起吊过程中:(g取10N/kg)
如图甲所示的是一台汽车起重机的示意图,起重钩的升降使用的是滑轮组,如图乙所示,滑轮组上钢丝绳的收放是由卷扬机来完成的.某次做业中,起重机将200kg的货物由地面起吊到5m的高度,所用时间为20s,钢丝绳的拉力F为800N.求起吊过程中:(g取10N/kg)
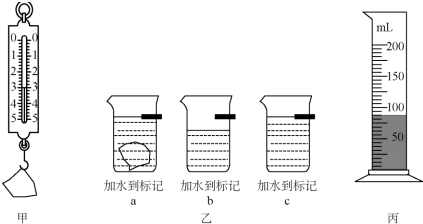
9.小明和小红利用如图甲装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件: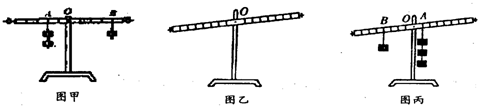
(1)如图乙,为使杠杆在水平位置平衡,应将左端的平衡螺母向右(选填“左”或“右”)移动,将杠杆调整在水平位置的目的是为了方便测量力臂大小;
(2)小明在实验中记录了三次实验数据如下表:这三次实验数据中有一次是错误的,错误数据的实验次数是1,由正确实验结果可得杠杆的平衡条件是F1L1=F2L2;
(3)小红调节好平衡后,在杠杆两端挂上钩码,杠杆的状态如图丙所示,为此,小红又调节两端的平衡螺母,使杠杆重新回到水平平衡位置,然后正确记录下钩码重、动力臂OA和阻力臂OB的值,分析实验数据后发现得不到教材中的“杠杆的平衡条件”,小红的哪一步操作导致了实验结果与教材中的结论不一致?答:杠杆上挂钩码后,小红又调节了平衡螺母;
(4)有同学用现有实验方案得到如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,这个结论与杠杆的平衡条件不符,原因是实验过程中B.
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性.
(1)如图乙,为使杠杆在水平位置平衡,应将左端的平衡螺母向右(选填“左”或“右”)移动,将杠杆调整在水平位置的目的是为了方便测量力臂大小;
(2)小明在实验中记录了三次实验数据如下表:这三次实验数据中有一次是错误的,错误数据的实验次数是1,由正确实验结果可得杠杆的平衡条件是F1L1=F2L2;
| 次数/实验 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.0 | 10 | 0.5 | 15 |
| 2 | 2.0 | 10 | 1.0 | 20 |
| 3 | 2.0 | 20 | 4.0 | 10 |
(4)有同学用现有实验方案得到如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,这个结论与杠杆的平衡条件不符,原因是实验过程中B.
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性.
 如图所示是蹦极运动的简化示意图,弹性绳一端固定在O点,另一端系住运动员,运动员从O点自由下落,到A点处弹性绳自然伸直.B点是弹性绳对运动员的拉力等于其重力的点,C点是蹦极运动员到达的最低点(忽略空气阻力),则从O点到C点的过程中运动员的重力势能一直在减小,在B(填“A”或“B”或“C)点处运动员的动能最大,从A点运动到C点运动员的机械能减小(填“增大”或“减小”或“不变”).
如图所示是蹦极运动的简化示意图,弹性绳一端固定在O点,另一端系住运动员,运动员从O点自由下落,到A点处弹性绳自然伸直.B点是弹性绳对运动员的拉力等于其重力的点,C点是蹦极运动员到达的最低点(忽略空气阻力),则从O点到C点的过程中运动员的重力势能一直在减小,在B(填“A”或“B”或“C)点处运动员的动能最大,从A点运动到C点运动员的机械能减小(填“增大”或“减小”或“不变”).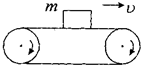 传送带上有一个物体m,当它在如图所示位置时,它与传送带一起以1m/s的速度在水平方向上匀速运动.空气阻力不计.请在图中画出m受力情况的示意图.
传送带上有一个物体m,当它在如图所示位置时,它与传送带一起以1m/s的速度在水平方向上匀速运动.空气阻力不计.请在图中画出m受力情况的示意图.