题目内容
20.根据指令[s,A](s≥0,0°<A<180°),机器人在平面上能完成下列动作:先原地逆时针旋转角度A,再朝其面对的方向沿直线行走距离s,现机器人在直角坐标系的坐标原点,且面对x轴正方向.(1)若给机器人下了一个指令[4,180°],则机器人应移动到点(-4,0);
(2)请你给机器人下一个指令[5,90°],使其移动到点(0,5).
分析 (1)若逆时针旋转180°,则机器人面对x轴负方向,根据向x轴负半轴走4个单位可得相应坐标;
(2)根据点(0,5)在y轴的正半轴上,距离原点5个单位,即可得到给机器人下的指令为[5,90°].
解答 解:(1)∵指令为[4,180°],
∴机器人应逆时针旋转180°,再向那个方向走4个单位长度,
∵机器人在直角坐标系的坐标原点,且面对x轴正方向,
∴机器人旋转后将面对x轴的负方向,向x轴的负半轴走4个单位,
∴机器人应移动到点(-4,0).
故答案为:(-4,0);
(2)∵使其移动到点(0,5),
∵点(0,5)在y轴的正半轴上,距离原点5个单位,
∴给机器人下的指令为[5,90°].
故答案为:[5,90°].
点评 本题考查了求新定义下的点的旋转坐标;理解所给定义得到移动后的规律是解决本题的关键.

练习册系列答案
相关题目
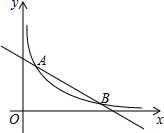 如图,平面直角坐标系中,A、B两点的纵坐标分别为8和2,直线AB与y轴所夹锐角为60°,反比例函数y=$\frac{k}{x}$(x>0)的图象经过A、B两点,则k=16$\sqrt{3}$.
如图,平面直角坐标系中,A、B两点的纵坐标分别为8和2,直线AB与y轴所夹锐角为60°,反比例函数y=$\frac{k}{x}$(x>0)的图象经过A、B两点,则k=16$\sqrt{3}$.
11.不等式x<1在数轴上表示为( )
| A. |  | B. |  | C. |  | D. |  |
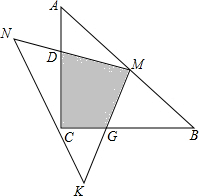 如图,△MNK和△ACB都是等腰直角三角形,M为AB的中点,AC=BC=4.若AD=1,求重叠部分图形的周长.
如图,△MNK和△ACB都是等腰直角三角形,M为AB的中点,AC=BC=4.若AD=1,求重叠部分图形的周长.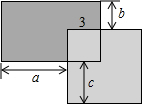 如图,一个正方形和一个长方形重叠在一起,重叠部分是边长为3的正方形,求阴影部分的面积.
如图,一个正方形和一个长方形重叠在一起,重叠部分是边长为3的正方形,求阴影部分的面积.
10.下列二次根式中,最简二次根式是( )
| A. | $\sqrt{6}$ | B. | $\sqrt{8}$ | C. | $\sqrt{12}$ | D. | $\sqrt{\frac{1}{2}}$ |